Az APM vezérlők felhasználói számára a telemetriai adatok átfedéséhez a speciális eszköz- Mini OSD. Az OSD rövidítés az angol On Screen Display szóból származik, ami további információk megjelenítését jelenti a kezelő képernyőjén.
A kínai gyártók mindkét repülésvezérlőt - HKPliot Mega, ArduFlyer és OSD vezérlőket - MAVLink-OSD gyártanak.

Külsőleg a Minim OSD nem sokban különbözik a MAVLink-OSD-től, olyan, mint a tábla tükörmásolata, ahol a fő chip 45 fokkal el van forgatva. Ezenkívül a MAVLink-OSD nem rendelkezik jumperekkel a videojel típusának kiválasztására és a digitális és analóg részek teljesítményének kombinálására.
A Minim OSD v1.0 túlmelegedési problémákat okozott 12 voltos kamera tápellátása esetén, ez a probléma 1.1-es verziójában oldották meg.
Mivel a HK-nak 2013 végén szállítási problémái voltak, megrendeltem az RCTimertől a MAVLink-OSD-t.

A programozáshoz mindenképpen szükség lesz egy FTDI adapterre. Ezért a MAVLink-OSD-vel együtt azonnal megvettem az FTDI Tool V1.0 adaptert http://www.rctimer.com/product_684.html .

Az eszköz konfigurálásához és flash-beállításához speciális szoftverre lesz szüksége, ez az úgynevezett ArduCam-OSD. Letöltés legújabb verzió szoftver Az ArduCam-OSD és a firmware itt található: http://code.google.com/p/arducam-osd/downloads/list. A Ebben a pillanatban jelenlegi verzió 2.0.
Telepítheti is alternatív firmware, a projekt neve minimosd-extra. Az információ itt található: https://code.google.com/p/minimosd-extra/. A firmware-hez saját segédprogramra lesz szüksége - a MinimOSD-Extra Config Tool-ra. Az archívum általában tartalmaz egy segédprogramot és egy firmware-t. Innen töltheti le: https://code.google.com/p/minimosd-extra/downloads/list. Felszalad a szem a verziók számától.
A táblát és az adaptert zsugorfóliába csomagoltam.
A vezérlő csatlakozója a csatlakoztatáshoz nagyon kényelmetlen, hat érintkezős, „bolondbiztos” védelem nélkül. Minden érintkezőt a programozáshoz használunk, de csak 4 érintkezőt használunk a repülésvezérlőhöz való csatlakozáshoz.
A programozáshoz meg kell találni egy mini-USB-kábelt.

Ami a négy tűs csatlakozót illeti, itt minden bonyolultabb. Ha összekeverik és hibásan csatlakoztatják, füst jöhet ki.
Csatlakoztatja az OSD-t a repülésvezérlőhöz a telemetriai csatlakozóban. Az OSD-hez vezető vezetéket a központi érintkezőkhöz kell csatlakoztatni: GND, VCC, RX, TX.
Ha rádiómodemet használunk, akkor azt párhuzamosan csatlakoztatjuk. Így az Y-kábelt kellett forrasztanom.

A képen az AIOP vezérlő vezetéke látható, amelyen a GPS is csatlakozik egy csatlakozóhoz.
Nem távolítottam el az OSD-m TX-jére menő vezetéket, hogy univerzális legyen, soha nem tudhatod, hol fogom még használni ezt a vezetéket.
Meg kell jegyezni, hogy ha nem kapcsol 5 voltot a kártya analóg részére, akkor a kártya néma lesz.

Egyes források felajánlják az alaplap átdolgozását és az analóg alkatrész tápellátását a digitálisról, de én ezt nem tettem meg, mivel az a vélemény, hogy interferencia léphet fel.
Azok számára, akik úgy döntenek, hogy egy áramforrásról csatlakoznak, az áramkör a képen látható lesz.

Jelenleg az analóg részem van, amelyet egy videó adó táplál, amiről már beszéltem az előző cikkemben.
ArduCAM OSD Config
Kezdjük a natív ArduCAM OSD Config segédprogrammal. Jelenleg a jelenlegi verzió a 2.1.2.0.
A fő elemek közül kiemelendő a programmenü, valamint három fül, amelyek a következő képernyők között váltanak: Config, Panel 1, Panel 2.
Konfig, itt minden nagyon világos.
Először is válassza ki a port számát, és kattintson az Olvasás OSD-ről gombra.

Megjegyzendő, hogy az NTSC - PAL videojel típusát a menün keresztül lehet váltani Videó programok mód. A Fájl menüpont lehetővé teszi a beállítások mentését és betöltését, vagy az alapértelmezett beállítások elérését. Az Opciók menüben engedélyezheti a Panel1 és 2 grid módot, frissítheti a firmware-t, kiválaszthatja a háttérképet, használhatja a naplót a beállításokhoz, hozzáadhatja saját betűtípusait.

Az 1. panel az első képernyőn megjelenő videón megjelenő információk testreszabására szolgál. A csatornaváltás szabad rádióvezérlő csatornára van beállítva OSD Toggle Channel.

Ennek megfelelően a második képernyőhöz a 2-es panelt állítottuk be.

A firmware frissítése ugyanazzal a segédprogrammal történik.

MinimOSD-Extra konfigurációs eszköz
Amikor megnyitjuk a MinimOSD-Extra Config Tool programot, úgy tűnik, hogy összekevertük a mappákat, és újra elindítottuk az ArduCAM OSD Config-ot. Ez az első benyomás, valójában nagyon hasonló, de több beállítás van.
Nézzük a főbb különbségeket.
Az első elem a modell típusának kiválasztása: repülőgép, helikopter.
Beállítás hozzáadva a képernyő automatikus átváltásához a legördülő menüben (Warnings Auto Panel Switch) megadott képernyőre figyelmeztetés esetén. Erre akkor van szükség, ha például a második képernyőn minden információt eltávolítanak, hogy semmi ne zavarja a nézetet.
Választhat, hogy százalékban vagy mA-ben jelenítse meg az akkumulátor töltöttségét.
És még egy Show sign before value blokk, amely az értékek előtti ikonok megjelenítéséért felelős.

Első képernyő

Második képernyő

eredmények
Először telepítettem a firmware-t az ArduCAM OSD Config segítségével.

Elvileg minden normális volt, de egy árnyalat zavart, amit a következőkben fejeztünk ki.
A készülék csatlakoztatása után azt vettem észre a képernyőn, hogy a bal oldalon lévő információk egy része le van vágva. A paraméterértékek előtti ikonok fele hiányzik. Úgy döntöttem, megpróbálom megváltoztatni a jel típusát PAL-ra, aminek eredményeként a helyzet még rosszabb lett, levágta a képernyő tetejét és alját, így visszatettem NTSC-re. Legyen ez csak az egyik oldalon, és ne a háromon, különösen azért, mert megpróbálhatja kijavítani ezt a hiányosságot a bal oldalon.

Az áthelyezett információ egy karakterrel jobbra blokkol.

A műtét fájdalommentes volt, volt elég hely erre.


Ennek eredményeként minden sikerült, az ikonok már teljesen láthatóak, az információk tökéletesen olvashatók a képernyőn.
De a MinimOSD-Extra 2.4 R726 firmware-t telepítették, de valami szégyent kezdett kiadni a képernyőn.

A kép olvashatatlanná vált, az információ zavaros volt az egész képernyőn.

többet letöltött korai változat 2.2.

Ezzel a firmware-verzióval az információk torzítás nélkül megjelentek.

következtetéseket
Kompakt és olcsó készülék. Elég sokoldalú ahhoz, hogy az eredeti ArduPilot Mega (APM) kártyákkal és annak klónjaival, a HKPILOT Mega, ArduFlyerrel, valamint az AIO (All-In-One) sorozatú vezérlőkkel MPNG vagy MultyWii firmware-rel egyaránt használható legyen. A fórumokon vannak információk a DJI Naza kontrollerekhez való csatlakozásról, de ehhez forrasztópákával a kezedben kell dolgozni.
Az egyetlen negatívum a táblán található hattűs csatlakozó, amelybe a négytűs csatlakozóval csatlakoztatjuk a kábelt. Sokféle variáció lehet, ha hibázik, akkor égetheti a táblát, hiszen nincs védelem.
Ne felejtse el táplálni a tábla digitális és analóg részét is, különben nem fog működni. Melyik táplálkozási módot válassza, itt kényelmesebb lesz valakinek.
Természetesen a MinimOSD-Extra jobban tetszett, mivel lehetővé teszi olyan további beállítások elvégzését, amelyek nincsenek az ArduCam OSD Configban. De mint kiderült, még mindig találnunk kell egy stabil verziót. Arra jöttem rá, hogy valamilyen firmware-nél megszakad az információ kimenete a videón. sikerült megtalálnom működő változat nem először. Ezért néhány MinimOSD-Extra opció nem volt elérhető számomra. Sajnos ez sok nyílt forráskódú projekt hátránya.
Ezért érdemes megjegyezni, hogy az ArduCam-OSD Config stabilabb és bevált.
A vezérlő minőségi információfedést hajt végre a videón, a szöveg meglehetősen világosnak és könnyen olvashatónak tűnik egy kis képernyőn. Nem vettem észre lassulást az információk megjelenítésében.
Ebben az útmutatóban bemutatjuk a normál és a Micro verziót, az MW-OSD firmware beállítását és használatát, valamint a Naze32 és a vevőegység csatlakoztatását.
Mi az a MinimOSD és Micro MinimOSD
Annak ellenére, hogy a beállítás sokkal bonyolultabb, mint más OSD-k, például a Super Simple OSD vagy az E-OSD, amelyeket csatlakoztatok, és azonnal működnek, a MinimOSD számos előnnyel rendelkezik, és megjelenés A képernyő teljesen személyre szabható.
A legtöbb hasznos funkciókat: GPS koordináta kijelzés, testreszabható stílusok és betűtípusok, az OSD menü segítségével módosíthatja a PID erősítéseket, arányokat stb. Példa arra, hogy mit lehet megjeleníteni a képernyőn.
A PID együtthatók beállítása a menüben:

Méretek, tömeg, kivezetés, forrasztás a méretek csökkentése érdekében
Teljes méretű MinimOSD
Ez az OSD sok éve létezik. Ennek a verziónak (MinimOSD KV Mod-dal) az az előnye, hogy oldalán vannak tűk áramérzékelő, RSSI, feszültségérzékelő stb. csatlakoztatására. Korábban nagyon óvatosan magunknak kellett közvetlenül a chip lábaihoz forrasztanunk a vezetékeket, és ez nagyon nehéz volt. Ez a verzió nagyban megkönnyítette az életet. Vettem magamnak egy ilyen táblát (2-es verzió)

MinimOSD méretei KV Mod V2-vel: szélesség 21mm, hossz: 43mm, súly: 5,5g (csatlakozókkal együtt).
Micro MinimOSD
Csodálkozom ennek az OSD-nek a mikroméretén, de a teljes méretű verzió összes funkciójával rendelkezik. A 12V-ról való tápellátás lehetősége mellett, ami be régi verzió szinte soha nem használt, a tábla túlmelegedése miatt. Így nagyon ésszerű volt kidobni ezt a funkciót és csökkenteni a méretet.

A mikro verzió körülbelül 1/3-a súlyban és méretben.
Forrasztó csatlakozók
A csatlakozók forrasztása a teljes méretű MinimOSD-hez egyszerű és egyértelmű volt, de a mikro verziónál nem szeretem, ahogy az emberek általában forrasztják őket.

Kreatívom: szögletes csatlakozókat kell használnom az egyenesek helyett, így van egy extra szabad hely a helikopter belsejébe szerelve.
A legvégén hőzsugorítóba csomagoljuk a forrasztás és a vezetékek védelmére.
Csatlakoztassa a Naze32-t, akkumulátort, vevőt, kamerát, videó adót
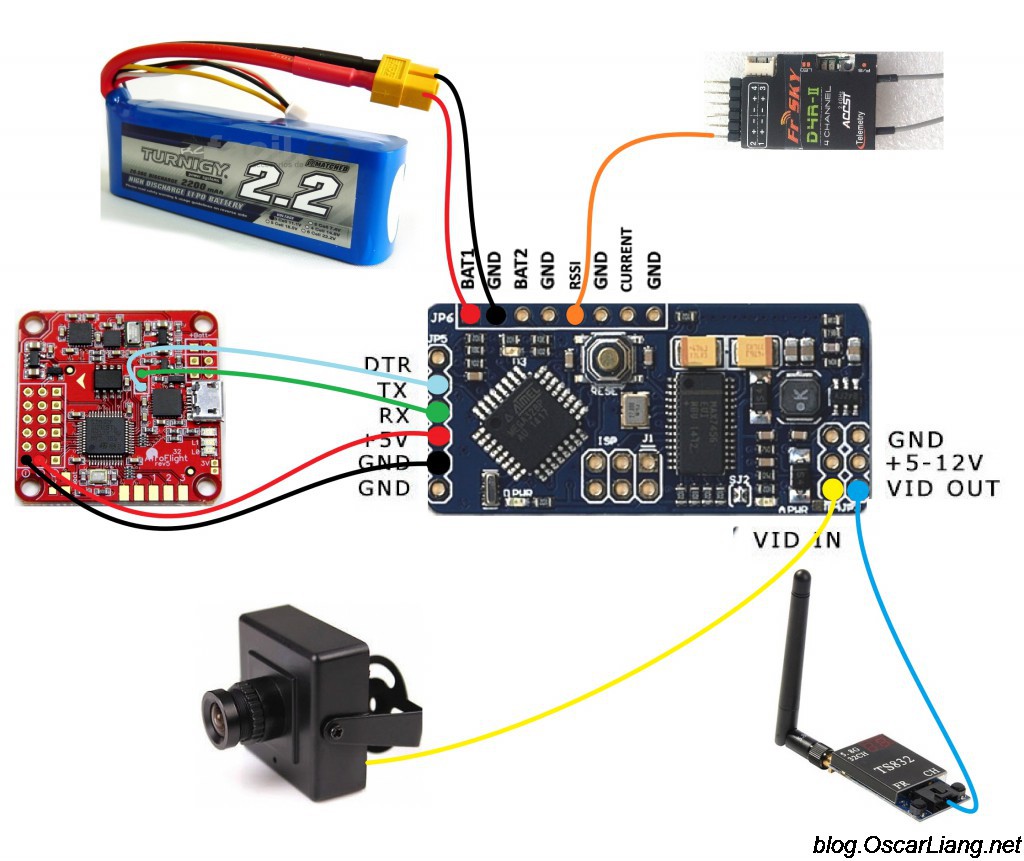
A helikopterem összeszerelése nagyon egyszerű. Itt a diagramon minden, amit csatlakoztatni kell: Naze32, LiPo, vevő, FPV kamera és videó adó.

Normál MinimOSD csatlakozási rajza Naze32-vel, kamerával, vevővel, videó adóval, akkumulátorral.
A mikro verzió csatlakoztatása:

Gyakran ismételt kérdés 1. Néhányan panaszkodnak, hogy a szöveg eltűnik, ha a gázkart megnövelik. Megoldás: csatlakoztasson minden elektronikát - kamerát, OSD-t, videó adót egy közös földhöz.
GYIK 2. Az OSD nem jelenik meg, csak a fényképezőgép képe. Megoldás: próbálja megváltoztatni a PAL/NTSC szabványt az OSD beállításokban.
A VBAT1 érintkező a fő aljzathoz csatlakozik lítium akkumulátor feszültséget mutatni. Az RSSI pin a vezérlő vevőhöz csatlakozik a jelszint megjelenítéséhez (ha a vevő FrSky D4R-II, CPPM módban, akkor Pin1 a PPM jel, PIN2 az RSSI kimenet).
Ha a Naze32-höz a soros porton (TX és RX) keresztül csatlakozik, a Naze32 repülési adatokat küldhet a képernyőre (GPS, iránytű stb.), és az OSD képes lesz a repülésvezérlő PID együtthatóinak megváltoztatására a távirányító.
Légy óvatos! A számítógéphez való csatlakozás ugyanazt a soros portot használja, ami azt jelenti, hogy ha Baseflight vagy Cleanflight konfigurátort szeretne használni, először le kell tiltania a TX és RX funkciót az OSD-ről.
Soros port csatlakozás nélkül a MinimOSD önmagában megjeleníti az RSSI-t és a feszültséget.
Ha a Taranis-t PPM módban használja, kérjük, olvassa el ezt a cikket: hogyan lehet RSSI-t külön csatornán kapni (további vezetékek nélkül).
Így néz ki a mini quadom belsejében.
Konfigurálás MW-OSD GUI-val
A MinimOSD-hez elég sok firmware létezik, a kedvencem a Multiwii-OSD (mwosd). Jelenlegi verzió 1.3., a konfigurátora nagyon praktikus program. A képernyőmenü tiszta, a firmware frissült, a Cleanflight és a Baseflight támogatása. Azt is lehetővé teszi, hogy közvetlenül az OSD-ről állítsa be a PID-erősítést.
Csatlakoztassa a MinimOSD-t az FTDI programozóhoz
Mind a beállításhoz, mind a firmware-hez FTDI adapter szükséges. A csatlakozás 5 vezetéken megy keresztül: DTR (GRN), TX, RX, 5V és GND.


A MinimOSD beállítása az MW-OSD GUI használatával
Keresztül GUI Bármilyen repülési adat megjelenítését testreszabhatja. Mert Mini quaddal repülök, csak akku feszültség, RSSI és időzítő kell. 4S lítium akkumulátorokat használok, és az alacsony akkumulátorszint-figyelmeztetés 13,6 V-ra van állítva (cellánként 3,4 V, bár magasabbra kellene állítanom a küszöböt). A 3S konfigurációnál a feszültség, amelynél a figyelmeztetés megjelenik, 11 V-ra állítható. Az FPV-t PAL formátumban használom

Az egyetlen dolog, ami miatt aggódni kell, az az akkumulátor feszültsége. Az alapértelmezett érték korántsem ideális, ezért meg kell játszani a beállításokkal a megfelelő érték eléréséhez. Hogyan csináljam:
A "" alapértelmezett értéke feszültség beállítása" = 200,és az OSD által kijelzett feszültség 21.0V volt. Vettem egy multimétert, megmértem a feszültséget az akkumulátoron, és kaptam 11,1 V-ot

Most csökkentsük az értéket feszültség beállítása„110-ig, most 11,5 V van az OSD képernyőn. A paraméter állandó oda-vissza változásának elkerülése érdekében a pontos értéket matematikával és a már rendelkezésünkre álló információkkal kell kiszámolnunk 🙂 Ki kell számolnunk, hogy a "feszültségbeállítás" paraméter 1 értéke hány voltot ad.
(21.0-11.5)/(200-110) = 9.5/90 = 0.1056
Tudjuk, hogy a képernyőn a helyes értéknek 11,1 V-nak kell lennie, tehát a " feszültség beállítása"kellene:
110 - (11,5-11,1) / 0,1056 = 106,21 (106 megfelelő)
jelentése " feszültség beállítása» nem csak a konfigurátorban, hanem a képernyőmenüben is módosítható, így nem kell a MinimOSD-t a számítógéphez csatlakoztatni és a konfigurátort használni.
Arduino a MinimOSD programozója?
Megpróbáltam az Arduino UNO-mat FTDI programozóként használni, ahogy más eszközök esetében is tettem korábban. Az MW-OSD GUI programmal sikerült megváltoztatnom az OSD paramétereket. A MinimOSD felvillantásakor azonban problémába ütköztem, a hibaüzenet a következő volt:
avrdude: stk500_getsync(): nincs szinkronban: resp=0x00.
Valamiféle adatszinkronizálási problémának tűnik, de megbizonyosodtam róla, hogy az Arduino kártyán a DTR-t a RESET-hez megfelelően csatlakoztattam, nem tudom, mit tegyek még, ezért az FTDI programozómmal villogtam a MinimOSD-t.
OSD menü: PID, Rate, Voltage, RSSI beállítása
Az OSD menü a kedvenc funkcióm, és alapvetően ezért adtam fel a SuperSimple OSD-t. Számos beállítást módosíthat anélkül, hogy számítógéphez csatlakozna. Például a PID együtthatók értékeit közvetlenül a terepen módosíthatom a távirányítóm segítségével, bluetooth és számítógép nélkül! A gördülési sebesség és a hangmagasság paraméterei azonban nem változtathatók külön a Cleanflightban (angol nyelven), pillanatnyilag össze vannak kapcsolva (mindkettőt egyszerre lehet módosítani, kb. új verzió ezek a paraméterek függetlenek lesznek.
Az MW-OSD menü eléréséhez először hatástalanítania kell a helikoptert, majd:
- gáz a közepén
- yaw (yaw) – igaz
- pitch (pitch) - előre.
A menüben való navigáláshoz:
- Roll / pitch (pitch / roll) - a menüben való mozgáshoz
- Yaw (yaw) - értékek megváltoztatása
- PID Config (Roll/Pitch/Yaw PID különböző repülési módokhoz)
- RC hangolás (RC Rate, RC Expo, Pitch/Roll Rate, Yaw Rate, TPA (throttle PID Att)
- Feszültség (a feszültség megjelenítése vagy nem, "Feszültség beállítása", "Feszültségriasztás", "Cellák" értékek)
- RSSI (megjelenik vagy sem)
- Áram (megjeleníti a fogyasztott áramot vagy sem, annak beállítása)
- Haladó (Mértékegységek: méter/hüvelyk, jel: Pal vagy NTSC, iránytű)
- Kijelző (kapcsolók, gázkar, GPS koordináták, érzékelők, gimbal stb.)
- Statisztikák (távolság, maximális magasság, maximális sebesség, repülési idő)
villogó
Egyes MinimOSD gyártók maguk villogtatják a legfrissebb verziót, így nem kell aggódnia a villogás miatt. De lehet, hogy később frissíteni szeretné a firmware-t, vagy megpróbálhat egy másikat, hogy ellenőrizze a firmware verzióját, kapcsolja be az OSD-t a quadon, és nézze meg a feliratot a rendszerindító képernyőn.
Az utasítások mindegyik firmware-je részletesen leírja, hogyan kell villogni. Ez az összefoglaló:
- Töltse le a firmware fájlokat.
- Töltse le az Arduino IDE-t
- Nyissa meg a firmware fájlokat az Arduino IDE-ben
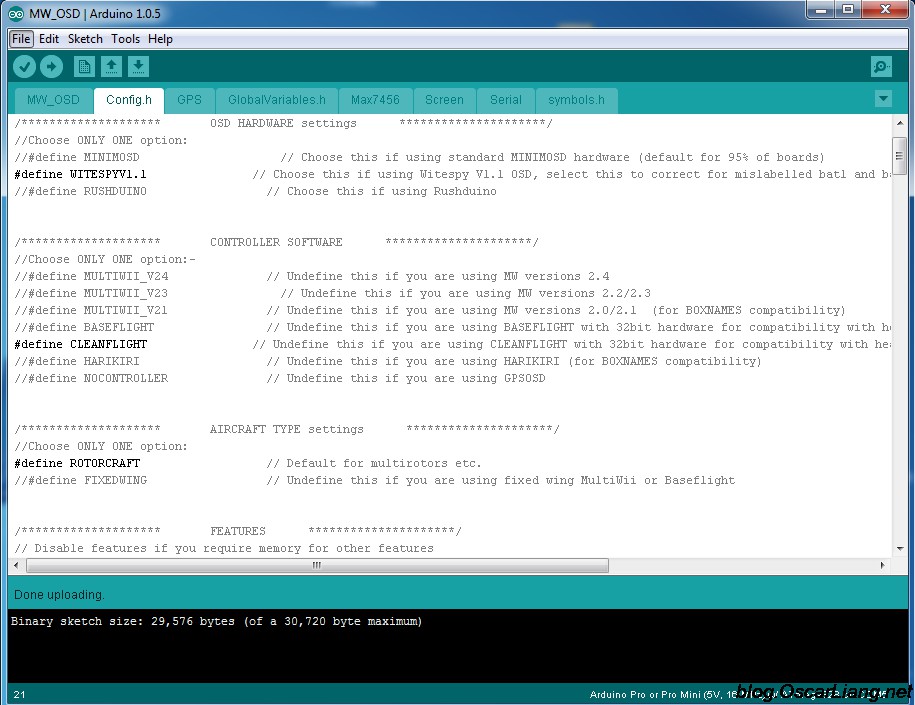
- Szükség esetén módosítsa a beállításokat
- Nem sokat változtattam, csak a tábla típusán (WitespyV1.1) és a repülésvezérlő firmware-én (Cleanflight)
- Csatlakoztassa az FTDI adaptert (programozót) a MinimOSD / Micro MinimOSD-hez
- Kattintson a Fordítás és feltöltés gombra
A cikkben megvizsgáljuk a MinimOSD csatlakoztatását, villogását és konfigurálását. És válaszolunk arra a kérdésre is, hogy mit tegyünk - ha valami elromlott, és mit tegyünk -, hogy mindennek ne legyen szomorú vége.
« Petka - készülékek!?!? -Háromszáz!!! -Mi az a háromszáz??? - Mi a helyzet a hangszerekkel?
MinimOSD. Olcsó és nagyon hasznos sál. Lehetővé teszi, hogy megnézze, mi történik most a helikopterrel - az aktuális feszültséget, hány ampert költöttek el, hány globális helymeghatározó műholdat rögzítettek, és nem engedi, hogy "elvesszen" az égen. Azt mondod, lehetetlen elveszni az égen? És itt nagyon is lehetséges. Kezdve az elemi „felszállt, jaj, de minden más fentről... ó, hol vagyok én magam?”, egészen nehéz repülési körülményekig, például sötétben vagy csapadékban repülés, vagy véletlenül berepülés. a felhő, mint az alábbi videóban:
A negyedik percben már csak a „haza” mentőnyíl jelezte, merre kell repülni.
Oké, oké, elég dalszöveg, gyakoroljunk!
KÉSZÍTMÉNY.
Tehát megrendelte magának a MinimOSD-t. A Banggoodon, a Hobbykingen vagy az RCTimeren – nem számít, hol, és valami ilyesmit kaptam:
Viszket a kezem, hogy csatlakoztassam a munkaállomáshoz, és megnézzem, mit mutat. De nem kell mindent egyszerre csinálni! Ez tele van új OSD megrendelésével - és ez Elvesztegetett idő(ami a fő) és persze az elveszett pénz.
Két nagy chip van az alaplapon: ATMEGA328P és MAX7456. Az első mikroáramkör (pontosabban mikrovezérlő) a repülésvezérlővel (a tábla „digitális része”) való kommunikációért felelős. A második pedig egy egycsatornás monokróm OSD (OnScreenDisplay - menü a képernyőn) a Maximtól, nevezzük a tábla "analóg részének". Tehát ez a MAX7456 egy meglehetősen szeszélyes mikroáramkör. Nem szereti a túlmelegedést, nem szereti az éles ugrásokat a "digitális" föld és az "analóg" között - egyszóval könnyen megég. És szerencsére a lusta kínaiak SOHA nem forrasztják a mikroáramkör rendes hűtőbordáját (a "hasra"). Ha a zsebkendőt abban a formában használod, ahogy jött - a MAX megég - 80% garancia. Hogy ez ne forduljon elő, az alábbi képen jelölt három lyukat forrasztunk.

Ehhez helyezzen be egy vékony forrasztóanyagot (1 mm átmérőjű, kívánatos, hogy azonnal fluxussal legyen) a lyukba, és forrasztópákával melegítse fel:

És itt az eredmény (a forrasztás nem túl jó, de amennyire csak tudom - jobb lesz!)

Most a kapcsolat jellemzőiről. A figyelmesek észrevették, hogy felülről forrasztottam a jumpert. Számos módja van a MinimOSD csatlakoztatásának, és sok másolat elromlik, ami jobb vagy helyesebb, vagy kevesebb interferenciát okoz. A csatlakoztatási módot a digitális és analóg földelés és a "digitális" részről 5 voltos tápellátás kombinációjával használom. Mivel a minimOSD meglehetősen sokat fogyaszt, jobb, ha a kártyát külön áramforrásról táplálja. Majdnem így néz ki:

Vagyis a tetején forrasztottam a jumpert, ezzel egyesítve a földeket. És még mindig le kell dobnia egy jumpert, a tábla "elülső" oldalán.

CSATLAKOZTATÁS ÉS BEÁLLÍTÁS
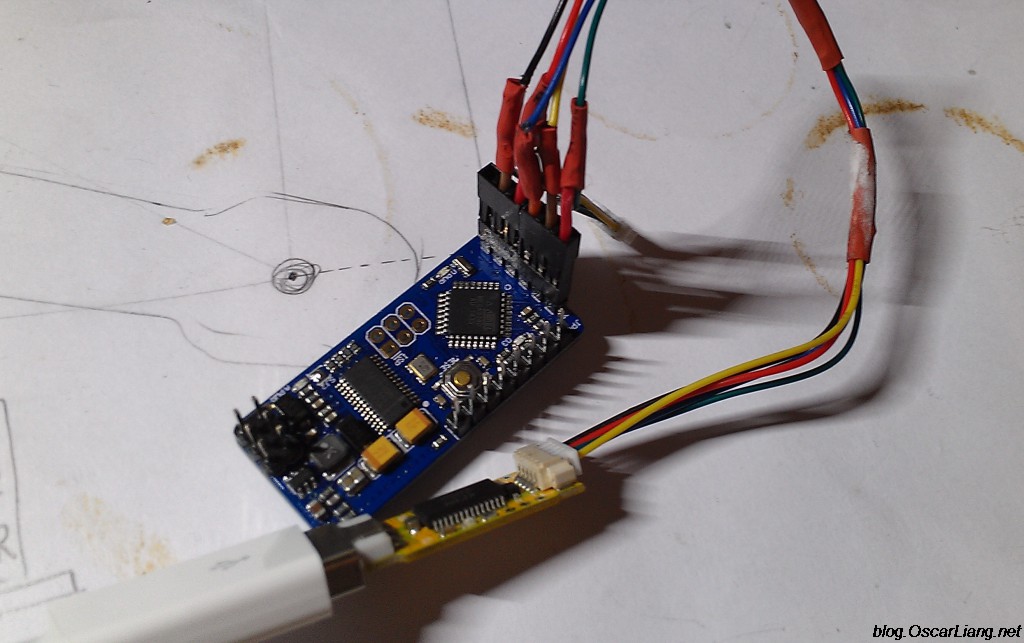
Nos, minden meg van forrasztva, most a sálunk készen áll a számítógéphez való csatlakoztatásra. Ehhez szükségünk van egy FTDI adapterre (például be, vagy bármilyen más USB-UART TTL adapterre).

5 vezetékkel kötjük össze, a bekötési rajz a következő: 1. GRN, 2. Tx, 3. Rx, 4. +5V, 5. GND (OSD oldalon) - az FTDI adapterre kötjük 1. DTR , 2. Rxi, 3 .Txo, 4.VCC, 5.GND. Itt egy kép arról, hogy nekem hogyan kapcsolódik:

Ha nem tiszta, nézze meg ezt a videót, különösen figyelmesen 1:03-nál
Most mit kell letölteni és hogyan kell konfigurálni. Először is azt mondom, hogy a helikopterek és a repülőgépek firmware-je más. A Multivia-hoz (kvTeam) is van firmware, és vannak külön modok is - az önálló munkától (repülésvezérlő nélkül), egészen a Naza-hoz való csatlakozásig.
De itt a "klasszikus" esetet vizsgáljuk - egy helikoptert egy AWP vezérlőn. a projekt hivatalos oldala. letöltési oldal (AWP alatti helikopter esetén be kell tölteni az ExtraCoptert). De ezek régi verziók, az emberek elég sokat módosítottak azóta. A modern firmware benne van. Az írás idején ez az R800 firmware, amely (MinimOSD_Extra felhasználó, Top_Secret jelszó) a Ya.Disken található.
Az archívum tartalmazza magát a firmware-t (HEX - fájl), egy fájlt fontokkal (mcm - fájl), és magát a programot (OSD_Config.exe).
Először menjünk az eszközkezelőbe, és ellenőrizzük az FTDI port sebességét (115200-at állítunk be):

Elindítjuk az OSD_Config.exe programot, kiválasztjuk a portot, megnyomjuk a „Read From OSD” gombot, a sikeres olvasásról üzenetnek kell megjelennie. Mivel nem tudni, hogy milyen firmware-t töltenek be gyárilag, hogy a jövőben ne legyenek problémák, feltöltjük egy frissrel. Ehhez kattintson az Opciók> Firmware frissítése menüre

válasszon ki egy fájlt, és töltse fel.
A sikeres firmware-ről üzenetet kapunk

Ezután a vezérlő inicializálja és betölti a beállításokat a programba, ami jelentésre kerül

Ideje letölteni a firmware-nek megfelelő betűtípus-fájlt (ha ez nem történik meg, az OSD megjelenése nagyon viccesnek vagy akár olvashatatlannak is bizonyulhat). Nyomja meg az Opció > Karakterkészlet frissítése menüt,

válassza ki az MCM fájlt, és töltse fel

Várjuk a készültséget

Öntés után a vezérlő újra inicializálásra kerül.



Hadd magyarázzam el egy kicsit:
RSSI csatorna - RSSI konvertálása százalékokká. Ahol 5 volt 255 (maximum oktálisban). És az FRsky vevő maximális jele 3,3 volt. Ha bejelöli az RSSI engedélyezése RAW jelölőnégyzetet, akkor az FPV képernyőn „nyers” adatokat fogunk látni. Őket tudjuk beállítani a beállításokba. Vagy egyszerűen beírhatod az értékeimet.
Egy másik finomság - OSD képernyők váltása. Amint látja, két panel van az adatok számára. Három megjelenítési lehetőségre válthatunk - screen1 (Panel1), screen2 (Panel2), üres képernyő adat nélkül (Disabled). Ehhez először el kell döntenünk, hogy pontosan hogyan fogunk váltani a képernyők között. Például, ha forgó vagy háromállású váltókapcsolóval váltunk a képernyők között, akkor három értéktartományunk lesz csatornánként (1. panel: 0-1233, 2. panel: 1233-1467, letiltva: 1467- 1701). Ebben az esetben a Rotation Switching kapcsolót ki kell kapcsolni. Ha pedig egy egyszerű kétállású váltókapcsolóval kapcsolunk, akkor van értelme a Rotation Switching engedélyezése. Ugyanakkor a váltókapcsoló bekapcsolt állapotában sorra váltunk képernyőket (Panel1 -> Panel2 -> Disabled -> Panel1 ......), ha a váltókapcsoló ki van kapcsolva, akkor a képernyők közötti váltás állj meg. Az OSD Toggle Channel legördülő listában van meghatározva, hogy melyik csatorna váltson képernyőt. A 6-os csatornára tettem. És van egy másik les, amelyet néhányan (köztük én is) kezdetben összezavarnak - Figyelmeztetés, automatikus panelváltás. Ez a lista határozza meg, hogy melyik képernyőre kell váltani, ha a korábban meghatározott figyelmeztetések bármelyike előfordul. Úgy tűnik, minden világos. Ön maga repül, valami történt repülés közben, az OSD átvált a kért képernyőre. De itt a kérdés - beállítjuk a képernyők közötti váltást, ez általában otthon van beállítva, a helikopter nem repül, ellenőrizni akarjuk - a képernyők nem kapcsolnak! De mivel általában nincs otthon GPS Fix - röviden, a figyelmeztetés működött! Tehát a képernyők közötti váltás „nem működik” ... 🙂
Nem tudom, hogy a többi paraméter pontosításra szorul-e, talán később kiegészítem a cikket.
Csak azt tudom mondani, hogy a főképernyő beállításakor nem szabad mindent egyszerre betolni. Jobb, ha először mindent kikapcsol (a bal oldali oszlopban), és csak ezután kapcsolja be csak azt, amire szüksége van, és azonnal helyezze el a képernyő jobb oldalára. Azt javaslom, hogy a képernyő szélein hagyjon üres helyet, ezt monitorral vagy DVR-rel le tudja vágni ceruzával, szemüveggel.
Következő egy másik fontos pont - OSD beállítása a Mission Plannerben. Tegyük fel, hogy mindent úgy csatlakoztatott, ahogy kell, de vicces számok és mesterséges horizont helyett az unalmas „No Mavlink Data” feliratot látjuk. Ez azt jelenti, hogy az OSD működik, szívesen mutatna valamit, de nem fogad adatokat. Vagyis nem érkezik adat a munkaállomásról az Rx lábra. Első lehetséges oka— a vezetékek összekeveredtek csatlakoztatáskor. Ellenőrizze, hogy az OSD-ből származó Rx csatlakozik-e a munkaállomás Tx portjához. A második lehetséges ok az, hogy maga a vezérlő nincs konfigurálva arra, hogy adatokat küldjön a COM portra. Ehhez egyszerű esetben a KEZDETI BEÁLLÍTÁS > Opcionális hardver > OSD fülön meg kell nyomni a Telemetria engedélyezése gombot. Ugyanakkor az MP automatikusan konfigurál számos olyan paramétert, amelyek lehetővé teszik az adatok OSD-re való küldését. Ha ez a varázsgomb nem segített, akkor mindent kis kezekkel kell beállítani. Ehhez lépjen a CONFIG / TUNING > Full Parameter List fülre, görgessen le az S betűig, és ellenőrizze (vagy javítsa) a paraméterértékeket:
- SR0_EXT_STAT = 2
- SR0_EXTRA1 = 5
- SR0_EXTRA2 = 2
- SR0_EXTRA3 = 3
- SR0_POSITION = 2
- SR0_RAW_SENS = 2
- SR0_RC_CHAN = 5
Ha az adatok továbbra sem érkeznek, és továbbra is a „No Mavlink Data” feliratot látjuk, akkor ellenőriznie kell, hogy az OSD a megfelelő porthoz csatlakozik-e (a cikk az UART0-ról beszél), szükség lehet az SR1 paraméterekre ( ugyanaz, mint fentebb, csak az UART1 porthoz). Az is előfordulhat, hogy az OSD nem működik a telemetriás modemmel együtt - ebben az esetben előfordulhat, hogy csatlakoztatnia kell, vagy éppen ellenkezőleg, le kell választania az OSD-n lévő Tx vezetéket. Van még egy hiba, hogy az OSD nem működik, ha az USB-kábel csatlakoztatva van a számítógéphez. Vagy csak összezavarta a vezetékeket...
Megosztok még egy fotót. A vezérlőmon egy összeomlás miatt leállt a telemetria fő portja, csak forrasztottam az UART0-ra. És akkor tetszett ez a kapcsolat.

Itt közvetlenül a vezérlőről tápláltam. De KÖTELEZŐ megnézni, hogy mi maradt 5 voltból magának a vezérlőnek. Az én esetemben magát a vezérlőt a vevő táplálja, és ott valamivel 5 voltnál magasabbra van állítva, így a vevő és a minimOSD figyelembevételével maga az APM szigorúan 5 volt volt.
Még egy pontot kell érinteni. Ha az OSD hibásan villog, a hiba " nem sikerült beszélni a bootloaderrel". Ez a hiba szó szerinti fordítása "hiba a rendszerbetöltővel való beszélgetésben". Ez akkor fordulhat elő, ha összegabalyodott vezetékek, vagy amikor a rendszerbetöltő összeomlik. Ha a vezetékek esetében minden világos (lásd fent, hogyan kell helyesen csatlakozni), akkor a bootloader esetében a mikrokontroller visszaállítására van szükség.
A Bootloader visszaállítása.
Ehhez legalább egy programozóra van szükségünk. Kényelmesebb az USBasp használata.

talán tetszeni fog ez az adapter (ISP10<>ISP6)
 vagy ez a kábel (elérhető)
vagy ez a kábel (elérhető)

Általában így vagy úgy, egy programozó segítségével csatlakozunk az ATMega328P-hez.
Az ISP csatlakozó kivezetése az OSD kártyán általánosan elfogadott. Általában az első érintkező négyzet alakú. Ha nem, akkor a legjobb a Vcc és a GND segítségével ellenőrizni.

A programozón a tűk általában alá vannak írva, ha nem, akkor általában így néz ki:

Ehhez először válassza ki a programozó típusát

Ezután válassza ki a tábla típusát

És mikrokontroller típus


és várjon körülbelül egy percet, amíg a rendszerbetöltő betöltődik (nézze meg a zöld állapotsort alul)
 Egészen addig, amíg meg nem jelenik egy üzenet, hogy a rendszerbetöltő sikeresen fel lett villantva
Egészen addig, amíg meg nem jelenik egy üzenet, hogy a rendszerbetöltő sikeresen fel lett villantva

(nem figyelünk az alábbi hibákra, frissíteni kell a programozó firmware-jét)
Következő - lépjen az OSD_Config.exe oldalra, töltse ki a firmware-t és a betűtípusokat a már leírtak szerint. Előfordulhat, hogy kétszer kell feltöltenie a firmware-t (a rendszerbetöltő feltöltése után még egy alkalom szükséges a vezérlő helyes inicializálásához).
Nos, nagyjából ennyi. Hirtelen, aki nem tudja, több van. Ha itt valami nem tiszta, ott "élőben" láthatod.
Sok sikert az OSD telepítéséhez a quadra!
Mindig a tied, Ganiev Timur - 5 éves 5.
5yoda5#apmcopter
Frissítés 2015.11.11.:„Nos, minden meg van forrasztva, most a sálunk készen áll a számítógépre való csatlakoztatásra. Ehhez szükségünk van egy FTDI adapterre (például az RCTimerre, vagy bármilyen más USB-UART TTL adapterre).
Frissítés 2016. 11. 03.: ISP-képek hozzáadva.
Ha hibát talál az oldalon, kattintson Shift+Enter vagy értesítsen bennünket.
Az OSD hasznos kiegészítő a kamerás repüléshez. Ebben a cikkben megnézzük, mi az OSD, hogyan csatlakozik FPV-berendezéseinkhez, és végül áttekintést adunk a különböző OSD-k képességeiről.
Ha bármilyen kérdése van - tudassa velem a megjegyzésekben.
Mi az OSD és mik az előnyei
Az OSD az On Screen Display rövidítése – azaz. megjelenítés a képernyőn vagy menü a képernyőn (azaz a fő kép tetején, általában a kamerából, valamilyen további információ, többnyire szöveg). Hobbinkban az OSD egy kicsi nyomtatott áramkör, amely a repülési paramétereket mutatja a kép tetején a fényképezőgépről. Ez lehetővé teszi a kvadrokopter állapotának közvetlen megfigyelését repülés közben a kamerán.
Ha rendelkezik megfelelő érzékelőkkel és OSD-vel, akkor közvetlenül a szemüvegén vagy a monitoron láthatja a repülési adatokat, például az akkumulátor feszültségét, a motorok és egyéb elektronikai eszközök feszültségét, a magasságot, a GPS-koordinátákat stb.
Ez biztonságosabbá teszi a kamera körüli repülést, mert láthatja az akkumulátor töltöttségi szintjét, tudja, mikor kell leszállni, mennyit repült már, és milyen irányba kell visszatérnie.
A kamera repüléséhez nem szükséges az OSD, de mint látható, rendkívül hasznos. A legtöbben legalább SimpleOSD-t vesznek, hogy lássák az akkumulátor feszültségét, ez azért szükséges, hogy elkerüljük a túltöltést (ha messzire repülünk, akkor nem hallható a lemerült akkumulátort jelző sziréna).
Az OSD használatával megjeleníthető adattípusok
A képen a leggyakrabban használt adatsor látható a kamera körüli repülés közben.

Időzítő
Az OSD típusától függően ez lehet repülési idő (a felszállás pillanatától kezdődően) vagy üzemidő (a kvadrokopter bekapcsolásának pillanatától kezdve). Egyes OSD-k lehetővé teszik többféle időzítő megjelenítését.
Akkumulátor feszültség
Szinte minden OSD lehetővé teszi a feszültség megjelenítését. Ez a legfontosabb információ, amikor a kamera körül repül, így tudja, mikor kell leszállni (általában akkor landolok, amikor a feszültség cellánként 3,5 V-ra esik)
A jelenlegi felhasználás
Ha van áramérzékelője, akkor nyomon követheti, hogy a motorok mekkora áramot vesznek fel, és mennyi mAh-t töltött már el az akkumulátorból.
RSSI
Az RSSI az adó jelerősségét jelzi, általában százalékban. Minél messzebbre repül, annál gyengébb lesz a jel, ez az információ segít megtudni, hogy mikor kell visszafordulni.
Az RSSI a vezérlő vevő kimenete, általában PWM formátumban, így szükség lehet D/A konverterre és aluláteresztő szűrőre.
Figyelmeztetések
Egyes OSD-k különböző riasztásokat, figyelmeztetéseket jeleníthetnek meg, amelyekhez Önnek felhasználóként küszöbértékeket kell beállítania olyan paraméterekhez, mint az akkumulátor feszültsége, RSSI-értéke stb.
Repülőgép üzemmód
Műsorok aktuális mód a helikoptered járata. Ez az információ akkor lesz hasznos, ha gyakran vált a különböző módok között, mint például a Loiter (helyben lebeg), kézi üzemmód, önszintező üzemmód, így nem kell azon töprengeni, hogy éppen milyen üzemmódban van a repülőgép. Ehhez csatlakoztatnia kell a repülésvezérlőt az OSD-hez.
GPS
A GPS segítségével nem csak a drón koordinátáit kapod meg, hanem a magasságát is (bár ez pontosabb lesz, mint barométer vagy szonár). Köszönet trükkös számítások, láthatjuk a talaj feletti sebességet, a kiindulási pont távolságát és annak koordinátáit (a kiindulópont irányának grafikus megjelenítése nagyon hasznos dolog, főleg ha kicsit eltévedünk).
Horizont
A virtuális horizont segít megérteni, hogyan dől meg a drón az űrben.
OSD csatlakozás a kamerában, a videó adóban és a repülésvezérlőben
Az összes OSD-t három típusra osztanám:
- Önálló OSD-k
- Az OSD a repülésvezérlőtől függ
- hibrid
Az önálló OSD-k csak a kamerához és a videó adóhoz csatlakoznak, és nem kommunikálnak a repülésirányítóval. Néha közvetlenül csatlakoztathatók a GPS-hez vagy más érzékelőkhöz, hogy hozzáférjenek a leolvasott adatokhoz. Jó példa erre a típusra a Skylark OSD (+GPS és áramérzékelő) és a Super Simple OSD.
A vezérlőfüggő OSD-k csak a repülésvezérlőtől származó adatokra támaszkodnak, általában a soros porton (RX/TX) keresztül. Maga az OSD nem tesz mást, mint megjeleníti ezeket az adatokat. A MinimOSD a Hobbykinggel az jó példa ez a fajta OSD (ha a verzió módosítások nélküli, például KV mod). Ennek a típusnak az az előnye, hogy az OSD a vezérlő érzékelőitől kapott adatokat használja fel, ami azt jelenti, hogy a vezérlő maga használja fel ezeket az adatokat a kezelés és vezérlés egyszerűsítésére. Míg az önálló OSD-k esetében az OSD-hez csatlakoztatott érzékelők adatait a repülésvezérlő nem tudja felhasználni.
A hibrid típusú OSD használható önálló OSD-ként (korlátozott funkcionalitással), és vezérlőhöz is csatlakoztatható a megjelenített repülési adatok mennyiségének növelése érdekében. A KV mod-os MinimOSD remek példa erre az OSD-típusra: ha önállóként használjuk, csak az RSSI-t és a feszültséget látja, de ha GPS-es vezérlőhöz csatlakozik, akkor látni fogja az aktuális repülési módot, GPS koordinátákat, magasságot. stb.
A legegyszerűbb csatlakozás – önálló OSD
Példaként csatlakoztassa a Hobbyking Super Simple OSD-t FPV kamerához, videó adóhoz és 3S lítium akkumulátorhoz.

Elméletileg a Bat2 porton keresztül figyelheti a második akkumulátor feszültségét.
Hibrid OSD-k csatlakoztatása
Megjegyzem, ebben az esetben az OSD önállóan méri az akkumulátor feszültségét és az RSSI szintet (bár lehet csatlakoztatni a vezérlőhöz és adatokat továbbítani a soros portján, mindkét lehetőség jól működik).
Ha meg kell jeleníteni a koordinátákat, a kiindulási pont irányát és a távolságot, akkor csatlakoztatnia kell a GPS-t a Naze32-hez.
OSD, amit már használtam
MinimOSD KV Team Mod
A MinimOSD jelenleg a kedvenc OSD-m, és ezt használom. A megfelelő firmware letöltésével a MinimOSD használható Naze32, CC3D, Multiwii, APM és PixHawk kártyákkal. Ez nagyon jó fizetés, amely abszolút bármilyen repülési információt képes megjeleníteni, amely az érzékelőktől elérhető.

A MinimOSD az érzékelőktől származó bármilyen információt képes megjeleníteni
A Hobbyking és a Banggood eladja a MinimOSD-t, de megvan az eredeti verzió, aminek nincs oldalán további tűk az RSSI-hez, akkumulátorfeszültséghez stb. Nem lépnék kapcsolatba velük, ha lehet vásárolni MinimOSD KV Mod-ot.
MinimOSD Micro

Pontosan ugyanaz az OSD, mint fentebb, a különbség az kisebb méret. Ráadásul nincs rajta 12V -> 5V átalakító, de ez nem is fontos, mert. amúgy senki nem használja ezt az átalakítót a tábla túlmelegedése miatt.
BrainFPV
Ez a tábla is mutat bármit, a megfelelő érzékelőkkel.

A Betaflight OSD (On Screen Information) egy integrált információ különféle érzékelők a videofolyamhoz a repülésvezérlőn keresztül. Általában az OSD egy kiegészítő telepített kártya, vagy egy már integrált chip a repülésvezérlőben. Az OSD információkat, például akkumulátorfeszültséget, horizontot, magasságot és egyebeket továbbít a sisak vagy a szemüveg képernyőjére.
Az OSD menüt is használhatja a quadcopter PID-jének, szűrőinek és egyéb beállításainak módosítására. Ebben a cikkben elmagyarázom, mi az a Betaflight OSD, mit csinál, és hogyan kell beállítani.
Betaflight OSD vs. MinimOSD (MWOSD)
A Betaflight OSD egyszerűbb és jobb, mint a MinimOSD:
- Az első egy már integrált chip a repülésvezérlőben, nem kell forrasztani és csatlakoztatni semmit, míg a MinimOSD egy külön tábla, amelyre a quadcopter összes alkatrészét kell forrasztani, mint PC, kamera, videó jeladó, és így tovább, attól függően, hogy melyik érzékelőt használja többet. Ezen kívül szükség van egy programozóra, aki ezt a modult számítógépen keresztül villogtatja.
- A Betaflight OSD előnyei: egyszerű beállítás mert már minden integrálva van. A konfiguráció a Betaflight grafikus felületen történik. Nem kell forrasztania, flashelnie semmit, nincs szüksége programozóra és harmadik féltől származó modul firmware-re.
- A Betaflight OSD nem foglal el UART portot, mivel általában az SPI BUS-hoz csatlakozik.
Bár most a MinimOSD már elég jól kidolgozott, és van grafikus héja és hasonló tulajdonságai is.
Mely repülésvezérlők támogatják a Betaflight OSD-t?
Nem minden integrált OSD-vel rendelkező repülésvezérlő támogatja a Betaflight OSD-t, néhányhoz további OSD-beállító szoftverre van szükség.
Jelenleg a Betaflight OSD-t a következő repülőgépek támogatják: Matek F405, DYS F4 Pro, Kakute F4, Omnibus F4 és Betaflight F3.
A Betaflight OSD konfigurálása
Először győződjön meg arról, hogy rendelkezik legújabb firmware a repülésvezérlőn, mivel az OSD-t a Betaflight V3.1 és újabb firmware támogatja.
Ha a repülőgépe már rendelkezik integrált OSD chippel, egyszerűen csatlakoztassa a kamerát és a videó adót a megfelelő portokhoz.
Az alábbiakban egy példa látható arra, hogyan kell csatlakoztatni a kamerát és az adót a DYS F4 Pro FC repülésvezérlőhöz, a kamera a "Vin"-hez, az adó pedig a "Vout"-hoz csatlakozik:
Most csatlakozzon a Betaflight Configuratorhoz, lépjen a lapra Konfigurációés kapcsolja be OSD:
Ezután lépjen az OSD fülre a beállítás megkezdéséhez:
Mi lehetne egyszerűbb ennél a felületnél? Csak kapcsolja be és ki a megjeleníteni kívánt adatokat.
Videó formátum – Válassza a PAL vagy NTSC lehetőséget attól függően, hogy az FPV kamera milyen módban van. Ha nem tudja, milyen üzemmódban van a kamera, állítsa AUTO-ra, a program választ kívánt formátumot hogy a kamera működjön.
Fontos információ : ha képernyő előnézet PAL vagy AUTO módban, és a kamera NTSC-ben működik, a képernyő alján látható adatok le lesznek vágva, ez egy funkció ezt a formátumot, rövidebb a kerete. AUTO formátum használata esetén a legjobb, ha a képernyő közepére helyezi a szükséges adatokat.
A "Riasztás" blokkban beállíthatja az RSSI értékeket, az akkumulátor kapacitását, a repülés előtti időt (stopper) és a magasságot. Amint az adatok elkezdenek megegyezni ezekkel a számokkal, villogni kezdenek a sisak vagy a szemüveg képernyőjén.
Az előnézeti ablakban tetszés szerint húzhatja a megjelenített adatokat, de ne tegye túl közel a szélekhez, mert akkor levágható.
- Akkumulátor feszültség kijelző
- Repülési idő (stopper)
- Név (saját)
- Gázértékek
- Mennyi áramot fogyaszt a drón
- Mennyi mAh akkumulátorkapacitás veszett kárba
Az OSD menü szemüvegben vagy sisakban történő aktiválásához a távirányítón a pálcamozgások kombinációjára van szükség:
- gáz a központban
- yaw (yaw, axis roll) balra
- pitch (pitch, tilt) előre
A gáznak a teljes hangolás közepén kell lennie!
A menüben való navigáláshoz használja a gombot jobb bot a távirányítón. Görgetéshez - húzza felfelé vagy lefelé, egy menüpont kiválasztásához - tartsa balra/jobbra.
Itt módosíthatja a PID-ket, szűrőket, profilokat stb. A legtöbb ilyen beállítás magától értetődő, ha már konfigurálta a Betaflight-ot az OSD lap grafikus felületén keresztül. De még mindig nem minden elem található itt, néhány csak magában a konfigurátorban érhető el. A beállítások elvégzése után lépjen a főmenübe, és kattintson a " Mentés * Újraindítás«.
Betaflight OSD betűtípus váltása
Ha nem tetszik a képernyőn megjelenő betűtípus, a Betaflight Configuratorban egyszerűen módosíthatja, ehhez lépjen az OSD fülre, és alul megjelenik egy Font Manager gomb:
Az új betűtípus kiválasztása után az előnézeti ablak továbbra is az alapértelmezett betűtípust fogja megjeleníteni, de a védőszemüveggel és a sisakjával együtt kiválasztotta lesz, szóval ne aggódjon.
Gyakran Ismételt Kérdések
Miért nem látom az OSD adatait a sisakban?
Ellenőrizze, hogy a megfelelő videóformátumot adta-e meg, PAL vagy NTSC, próbálja meg cserélni. Ha továbbra sem működik, ellenőrizze a kábelezés és a forrasztás minőségét a kamerától és az adótól az OSD-modulig.
Hogyan lehet nevet változtatni?
Betaflightban a config fülön görgess lejjebb, ott lesz a "Craft name" szövegmező, ott más nevet írhatsz.