Введение
Дистанционное зондирование является методом получения информации об объекте или явлении без непосредственного физического контакта с данным объектом. Дистанционное зондирование является подразделом географии. В современном понимании, термин в основном относится к технологиям воздушного или космического зондирования местности с целью обнаружения, классификации и анализа объектов земной поверхности, а также атмосферы и океана, при помощи распространяемых сигналов (например, электромагнитной радиации). Разделяют на активное (сигнал сначала излучается самолетом или космическим спутником) и пассивное дистанционное зондирование (регистрируется только сигнал других источников, например, солнечный свет). Пассивные сенсоры дистанционного зондирования регистрируют сигнал, излучаемый или отраженный объектом либо прилегающей территорией. Отраженный солнечный свет – наиболее часто используемый источник излучения, регистрируемый пассивными сенсорами. Примерами пассивного дистанционного зондирования являются цифровая и пленочная фотография, применение инфракрасных, приборов с зарядовой связью и радиометров.
Активные приборы, в свою очередь, излучают сигнал с целью сканирования объекта и пространства, после чего сенсор имеет возможность обнаружить и измерить излучение, отраженное или образованное путём обратного рассеивания целью зондирования. Примерами активных сенсоров дистанционного зондирования являются радар и лидар, которыми измеряется задержка во времени между излучением и регистрацией возвращенного сигнала, таким образом определяя размещение, скорость и направление движения объекта. Дистанционное зондирование предоставляет возможность получать данные об опасных, труднодоступных и быстродвижущихся объектах, а также позволяет проводить наблюдения на обширных участках местности. Примерами применения дистанционного зондирования может быть мониторинг вырубки лесов (например, в бассейне Амазонки), состояния ледников в Арктике и Антарктике, измерение глубины океана с помощью лота. Дистанционное зондирование также приходит на замену дорогостоящим и сравнительно медленным методам сбора информации с поверхности Земли, одновременно гарантируя невмешательство человека в природные процессы на наблюдаемых территориях или объектах. При помощи орбитальных космических аппаратов ученые имеют возможность собирать и передавать данные в различных диапазонах электромагнитного спектра, которые, в сочетании с более масштабными воздушными и наземными измерениями и анализом, обеспечивают необходимый спектр данных для мониторинга актуальных явлений и тенденций, таких как Эль-Ниньо и другие природные феномены, как в кратко-, так и в долгосрочной перспективе. Дистанционное зондирование также имеет прикладное значение в сфере геонаук (к примеру, природопользование), сельском хозяйстве (использование и сохранение природных ресурсов), национальной безопасности (мониторинг приграничных областей).
Обзор основных приборов дистанционного зондирования
Радары, в основном, применяются в системах контроля воздушного трафика, раннего оповещения, мониторинга лесного покрова, сельском хозяйстве и для получения метеорологических данных большого масштаба. Радар Допплера используется правоохранительными организациями для контроля скоростного режима автотранспорта, а также для получения метеорологических данных о скорости и направлении ветра, местоположении и интенсивности осадков. Другие типы получаемой информации включают в себя данные об ионизированном газе в ионосфере. Интерферометрический радар искусственной апертуры используется для получения точных цифровых моделей рельефа больших участков местности.
Лазерные и радиолокационные высотомеры на спутниках обеспечивают получение широкого спектра данных. Измеряя отклонения уровня воды океана, вызванные гравитацией, данные приборы отображают особенности рельефа морского дна с разрешением порядка одной мили. Измеряя высоту и длину волны океанских волн при помощи высотомеров, можно узнать скорость и направление ветра, а также скорость и направление поверхностных океанических течений.
Ультразвуковые (акустические) и радиолокационные датчики используются для измерения уровня моря, приливов и отливов, определения направления волн в прибрежных морских регионах.
Технология светового обнаружения и определения дальности (ЛИДАР) хорошо известна своим применением в военной сфере, в частности, в лазерной навигации снарядов. ЛИДАРЫ используется также для обнаружения и измерения концентрации различных химических веществ в атмосфере, в то время как ЛИДАР на борту самолета может быть использован для измерения высоты объектов и явлений на земле с большей точностью, чем та, которая может быть достигнута при помощи радиолокационной техники. Дистанционное зондирование растительности также является одним из основных применений ЛИДАРа.
Радиометры и фотометры являются наиболее распространенными используемыми инструментами. Они фиксируют отраженное и испускаемое излучение в широком диапазоне частот. Наиболее распространенными являются датчики видимого и инфракрасного диапазонов, затем идут микроволновые, датчики гамма-лучей и, реже, датчики ультрафиолета. Эти приборы также могут быть использованы для обнаружения эмиссионного спектра различных химических веществ, предоставляя данные об их концентрации в атмосфере.
Стереоизображения, полученные при помощи аэрофотосъёмки часто используются при зондировании растительности на поверхности Земли, а также для построения топографических карт при разработке потенциальных маршрутов путём анализа изображений местности, в сочетании с моделированием особенностей окружающей среды, полученных наземными методами.
Мультиспектральные платформы, такие как Landsat активно использовались начиная с 70-х годов. Эти приборы использовались для построения тематических карт путём получения изображений в нескольких длинах волн электромагнитного спектра (мульти-спектра) и, как правило, они применяются на спутниках наблюдения за Землей. Примерами таких миссий являются в том числе программа Landsat или спутник IKONOS. Карты растительного покрова и землепользования, полученные методом тематического картографирования могут быть использованы для разведки полезных ископаемых, обнаружения и мониторинга использования земель, вырубки лесов, и изучения здоровья растений и сельскохозяйственных культур, в том числе огромных участков сельскохозяйственных земель или лесных массивов. Космические снимки программы Landsat используются регулирующими органами для контроля параметров качества воды, включая глубину Секки, плотность хлорофилла и общее содержание фосфора. Метеорологические спутники используются в метеорологии и климатологии.
Методом спектральной визуализации получают изображения, в которых каждый пиксель содержит полную спектральную информацию, отображая узкие спектральные диапазоны в пределах непрерывного спектра. Приборы спектральной визуализации используются для решения различных задач, в том числе применяются в минералогии, биологии, военном деле, измерениях параметров окружающей среды.
В рамках борьбы с опустыниванием, дистанционное зондирование позволяет наблюдать за областями, которые находятся в зоне риска в долгосрочной перспективе, определять факторы опустынивания, оценивать глубину их воздействия, а также предоставлять необходимую информацию лицам, ответственным за принятие решений по принятию соответствующих мер охраны окружающей среды.
Достоинства современных космических ДДЗ высокого разрешения:
Высокое пространственное разрешение – не хуже 1 м в панхроматическом режиме
Высокое радиометрическое разрешение – не менее 11 бит на пиксел в панхроматическом режиме
Наличие 4 спектральных каналов, в том числе 1 инфракрасного
Возможность получения стереосъемки
Возможность обновления картографического материала масштаба не хуже 1:5000
Периодичность получения данных на одну и ту же область на земной поверхности - 1-5 дней в зависимости от широты
Возможность заказа области произвольной формы, в т.ч. съемка протяженных объектов
Возможность получения «перспективной» съемки с отклонением от надира до 45 градусов
Большой архив – миллионы полученных снимков
Оперативность: возможность начала съемки в течение 1 дня с момента размещения заказа
Простота размещения заказа – нет необходимости получения разрешения от государственных организаций на проведение съемки
Простота обработки: заказчик получает данные, готовые для использования в ГИС.
Оптико-электронный тип съемки
Оптико-электронный (ОЭ) способ относится к невидимому диапазону съемки (нефотографическому). Ему всего несколько десятилетий существования. Необходимость оперативной передачи материалов съемки из космоса привела к интенсивному его развитию, а также к сканерных съемочных систем. При значительном разнообразии конструктивных решении они основаны на общем принципе.
Принцип сканерной съемки заключается в поэлементном считывании вдоль узкой полосы отраженного земной поверхностью излучения, а развертка изображения идет за счет движения носителя, поэтому оно принимается непрерывно.
Используются следующие виды съемок: маршрутная, площадная, конвергентная (стереосъемка) и протяженного объекта (рис. «Схемы ОЭ съемки»).
Излучение, поступившее от источника с Земли, преобразуется на носителе (самолете или ИСЗ) в электрический сигнал, затем в виде радиосигнала сбрасывается на наземную приемную станцию, где снова преобразуется в электрический сигнал и фиксируется на магнитных носителях. При такой съемке появляется возможность в течение длительного времени непрерывно и оперативно получать информацию (в режиме реального времени или с задержкой на несколько часов) и передавать ее на приемную станцию.
Разрешение при оптико-электронном способе сканирования бывает:
· сверхвысокое,
· высокое,
· среднее,
· низкое.
Первые сканирующие системы для съемки в оптическом диапазоне спектра имели разрешение 1-2 км, но их совершенствование идет очень быстро, и в настоящее время достигнуто разрешение в несколько метров.
Сканерная съемка чаще выполняется в многозональном варианте. Большинство сканеров, работающих в оптическом диапазоне, имеют три одинаковых канала:
· 0,5-0,6 мкм;
· 0,6-0,7 мкм;
· 0,8-1,1 мкм.
К ним в разных конструкциях добавляются каналы в других участках спектра:
в ближнем инфракрасном,
в тепловом инфракрасном,
панхроматический канал, обеспечивающий получение снимков с более высоким разрешением.
В последние годы появилась тенденция создания гиперспектральньх съемочных систем, ведущих съемку в 10 и более каналах.
Достоинство оптико-электронный съемки. Это их дискретный характер, благодаря чему снимки могут быть представлены:
В виде цифровой записи на магнитной ленте
В виде фотоизображения (фотоснимки).
Похожая информация.
Изобретение относится к технике получения изображения контролируемых объектов с помощью оптико-электронных систем с оптико-механической разверткой. Цель изобретения - улучшение качества передачи изображения путем увеличения числа строк разложения в кадре и повышение быстродействия. Изобретение позволяет повысить число строк в кадре при малом числе граней зеркального многогранника. На основе способа может быть создано малогабаритное сканирующее устройство с телевизионной частотой кадров и повышенным числом строк в кадре. Способ заключается в том, что осуществляют развертку одновременно М-параллельных элементарных строк, расположенных вплотную друг к другу, вторую кадровую развертку осуществляют непрерывной с угловой скоростью к2 =pMd э F к в пределах угла 2 первую кадровую развертку производят с шагом 2=M(p-s-1/N)d э а отношение углов устанавливают из условия ![]() , при этом число активных строк в кадре определяют из соотношения: z= M, где (m-1) - целое число крайних в растре М-строчных подкадров, во время которых производится обратный ход второй кадровой развертки, m= 1,2,3. ..; d э - угловая ширина строки; s - целое число пассивных перемежающихся полей в кадре, во время которых осуществляется обратный ход второй кадровой развертки, s=0,1,2...; с - КПД строчной развертки; к - угол обзора по кадру. Устройство, реализующее данный способ, содержит зеркальное N-гранное зеркало 1 с разным наклоном граней к его оси вращения, плоское зеркало 2, объектив 3 и М-элементный приемник 4 излучения. Пирамида 1 осуществляет строчную развертку и дискретную с шагом 2= =M(p-s-1/N)d э и частотой pF k первую кадровую развертку N-подкадров по М-элементарных строк, плоское зеркало 2 осуществляет вторую кадровую развертку с угловой скоростью w к2 = pMd э F k частотой F k кадров.
, при этом число активных строк в кадре определяют из соотношения: z= M, где (m-1) - целое число крайних в растре М-строчных подкадров, во время которых производится обратный ход второй кадровой развертки, m= 1,2,3. ..; d э - угловая ширина строки; s - целое число пассивных перемежающихся полей в кадре, во время которых осуществляется обратный ход второй кадровой развертки, s=0,1,2...; с - КПД строчной развертки; к - угол обзора по кадру. Устройство, реализующее данный способ, содержит зеркальное N-гранное зеркало 1 с разным наклоном граней к его оси вращения, плоское зеркало 2, объектив 3 и М-элементный приемник 4 излучения. Пирамида 1 осуществляет строчную развертку и дискретную с шагом 2= =M(p-s-1/N)d э и частотой pF k первую кадровую развертку N-подкадров по М-элементарных строк, плоское зеркало 2 осуществляет вторую кадровую развертку с угловой скоростью w к2 = pMd э F k частотой F k кадров.
Изобретение относится к технике получения изображения контролируемых объектов с помощью оптико-электронных систем с оптико-механической разверткой. Цель изобретения улучшение качества передачи изображения путем увеличения числа строк разложения в кадре и повышение быстродействия. На чертеже представлена оптическая схема устройства, реализующего предложенный способ. Устройство для осуществления предложенного способа содержит зеркальное N-гранное зеркало 1 с разным наклоном граней к его оси вращения, плоское зеркало 2, объектив 3 и М-элементный приемник 4 излучения. Грани N-гранного зеркала 1 наклонены к оси вращения в соответствии с формулой к = o +k, где o наименьший из углов наклона граней к оси, k=0,1,2,3.N-1, шаг в угловом расположении многогранников. Чувствительные элементы приемника 4 излучения расположены в виде линейки, проекция которой в плоскость предметов перпендикулярна к направлению строчной развертки. Устройство работает следующим образом. Поток излучения от объекта, отразившись от зеркальной грани N-гранного зеркала 1, попадает на плоское зеркало 2 второй кадровой развертки. После отражения от зеркала 2 этот поток фокусируется объективом 3 на чувствительные элементы приемника 4 излучения, являющегося преобразователем изменений потока излучения в электрический сигнал. Предложенный способ оптико-механического сканирования обеспечивает Z= M cтрок разложения в кадре. По сравнению с аналогом число Z строк увеличивается примерно в (p-s) раз без увеличения числа граней N многогранного зеркала, а по сравнению с прототипом число Z строк увеличивается примерно в М раз. При этом обеспечивается достаточный промежуток времени для обратного хода второй кадровой развертки. Упрощается также осуществление второй кадровой развертки, так как она является непрерывной, а не шаговой. При заданном числе Z строк, варьируя величины M, p, s и m, можно определить оптимальное число подкадров в перемещающихся полях, которое осуществляется при минимальных габаритах и массе сканирующего устройства. Повышение быстродействия по сравнению с прототипом заключается в уменьшении, примерно в М раз, числа p перемещающихся полей в кадре (во столько же раз уменьшается число оборотов N-гранного зеркала). Повышение быстродействия достигается также за счет упрощения реализации второй кадровой развертки, ввиду ее непрерывного характера на рабочем участке и достаточного промежутка времени для обратного хода, для которого используется время s-пассивных перемещающихся полей в кадре, время m-1 крайних в растре подкадров, а также промежуток между двумя последовательными во времени активными участками строчной развертки. По сравнению с аналогом, примерно в N раз уменьшается амплитуда угла отклонения по кадру и в N раз уменьшается угловая скорость качания плоского зеркала. На основе предложенного решения может быть создано малогабаритное сканирующее оптико-механическое устройство с телевизионной частотой кадров и повышенным числом строк в кадре.
Формула изобретения
Способ оптико-механического сканирования, заключающийся в том, что осуществляют строчную развертку кадра с частотой pNF k , где р целое число перемежающихся полей в кадре, N количество подкадров в каждом поле, F k кадровая частота, дискретную первую кадровую развертку с частотой pF k , числом (N-1) шагов и шагом 2, а также вторую кадровую развертку с частотой F k в пределах угла 2, обеспечивающего заполнение строками кадра, отличающийся тем, что, с целью улучшения качества передачи изображения путем увеличения числа строк разложения в кадре и повышения быстродействия, осуществляют развертку одновременно М-параллельных элементарных строк, расположенных вплотную друг к другу, вторую кадровую развертку осуществляют непрерывно с угловой скоростью w k2 = pMd э F k в пределах угла 2 первую кадровую развертку производят с шагом 2 = M(p-s-1/N), а отношение углов устанавливают из условия ![]() при этом число активных строк в кадре определяют из соотношения Z M где (m 1) целое число крайних в растре М-строчных подкадров, во время которых производится обратный ход второй кадровой развертки, m 1,2,3, d э угловая ширина строки; s целое число пассивных перемежающихся полей в кадре, во время которых осуществляется обратный ход второй кадровой развертки, s 0,1,2, c КПД строчной развертки; к угол обзора по кадру.
при этом число активных строк в кадре определяют из соотношения Z M где (m 1) целое число крайних в растре М-строчных подкадров, во время которых производится обратный ход второй кадровой развертки, m 1,2,3, d э угловая ширина строки; s целое число пассивных перемежающихся полей в кадре, во время которых осуществляется обратный ход второй кадровой развертки, s 0,1,2, c КПД строчной развертки; к угол обзора по кадру.
Изобретение относится к области приборов, предназначенных для преобразования электромагнитного излучения в электрический сигнал, несущий информацию об изображении, при размещении этих приборов на подвижном основании
Изобретение относится к области формирования потока видеоданных вращающимся секторным фотоприемником. Способ основан на формировании сигналов от фоточувствительных элементов, установленных по площади вращающегося сенсора, их последующей организации в ядра пространственного дифференцирования, выходные сигналы которых подвергаются аналого-цифровому преобразованию и их дальнейшей цифровой обработке. Фоточувствительные элементы устанавливают последовательно на равных расстояниях между собой на дугах с дискретными радиусами от Rmin до Rmax на площади вращающегося сенсора, имеющему форму усеченного сектора круга, который обращен большей стороной к внешнему диаметру вращения. Фототоки от фоточувствительных элементов усиливают по постоянному току и ограничивают по полосе частот в зависимости от чувствительности фотоэлементов и частоты вращения сенсора. Собственные шумы минимизируют и корректируют амплитудно-частотные характеристики каналов передачи сигналов каждого фоточувствительного элемента с последующим формированием ядер пространственного дифференцирования, сигналы с которых подвергают аналогово-цифровому преобразованию и последующей цифровой обработке. Технический результат - повышение качества изображения. 2 н.п. ф-лы, 6 ил.
Изобретение относится к технике получения изображения контролируемых объектов с помощью оптико-электронных систем с оптико-механической разверткой
Матрица является важнейшей частью любого сканера. Матрица трансформирует изменения цвета и яркости принимаемого светового потока в аналоговые электрические сигналы, которые будут понятны лишь единственному ее электронному другу – аналого-цифровому преобразователю (АЦП). С этой точки зрения, АЦП можно сравнить с гидом-переводчиком, неизменным ее компаньоном. Только он как никто другой понимает матрицу, ведь никакие процессоры или контроллеры не разберут ее аналоговые сигналы без предварительного толкования преобразователем. Только он способен обеспечить работой всех своих цифровых коллег, воспринимающих лишь один язык – язык нулей и единиц.
Световой поток, падая на поверхность матрицы, буквально "вышибает" электроны из ее чувствительных ячеек. И чем ярче свет, тем больше электронов окажется в накопителях матрицы, тем больше будет их сила, когда они непрерывным потоком ринутся к выходу. Однако сила тока электронов настолько несоизмеримо мала, что вряд ли их "услышит" даже самый чувствительный АЦП.
Именно поэтому на выходе из матрицы их ждет усилитель, который сравним с огромным рупором, превращающим, образно говоря, даже комариный писк в вой громогласной сирены. Усиленный сигнал (пока еще аналоговый) "взвесит" преобразователь, и присвоит каждому электрону цифровое значение, согласно его силе тока.
Большинство современных сканеров для дома и офиса базируются на матрицах двух типов: на CCD (Charge Coupled Device) или на CIS (Contact Image Sensor). Корпус CIS-сканера плоский, в сравнении с аналогичным CCD-аппаратом (его высота обычно составляет порядка 40-50 мм).
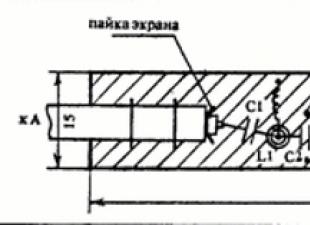
CCD-сканер обладает большей глубиной резкости, нежели его CIS-собрат. Достигается это за счет применения в его конструкции объектива и системы зеркал.
На рисунке, для простоты восприятия, нарисовано лишь одно зеркало, тогда как у типового сканера их не менее трех-четырех
Сканеры с CCD-матрицей распространены гораздо больше, чем CIS-аппараты. Объяснить это можно тем, что сканеры в большинстве случаев приобретаются не только для оцифровки листовых текстовых документов, но и для сканирования фотографий и цветных изображений. Погрешность разброса уровней цветовых оттенков, различаемых стандартными CCD-сканерами составляет порядка ±20%, тогда как у CIS-аппаратов эта погрешность составляет уже ±40%.
CIS-матрица состоит из светодиодной линейки, которая освещает поверхность сканируемого оригинала, самофокусирующихся микролинз и непосредственно самих сенсоров. Конструкция матрицы очень компактна, таким образом, сканер, в котором используется контактный сенсор, всегда будет намного тоньше своего CCD-собрата. К тому же, такие аппараты славятся низким энергопотреблением; они практически нечувствительны к механическим воздействиям. Однако CIS-сканеры несколько ограничены в применении: аппараты, как правило, не приспособлены к работе со слайд-модулями и автоподатчиками документов.
Из-за особенностей технологии CIS-матрица обладает сравнительно небольшой глубиной резкости. Для сравнения, у CCD-сканеров глубина резкости составляет ±30 мм, у CIS – ±3 мм. Другими словами, положив на планшет такого сканера толстую книгу, получишь скан с размытой полосой посередине, т.е. в том месте, где оригинал не соприкасается со стеклом.
У CCD-аппарата вся картина будет резкой, поскольку в его конструкции есть система зеркал и фокусирующая линза. В свою очередь, именно достаточно громоздкая оптическая система и не позволяет CCD-сканеру достичь столь же компактных размеров, как у CIS-собрата.
В плане разрешающей способности CIS-сканеры также не конкурент CCD. Уже сейчас некоторые модели CCD-сканеров для дома и офиса обладают оптическим разрешением порядка 3200 dpi, тогда как у CIS-аппаратов оптическое разрешение ограничено пока что 1200 dpi.
Сканеры с CIS-матрицей нашли свое применение там, где требуется оцифровывать не книги, а листовые оригиналы. Тот факт, что эти сканеры целиком получают питание по шине USB и не нуждаются в дополнительном источнике питания, пришелся как нельзя кстати владельцам портативных компьютеров.
CCD-матрица представляется "большой микросхемой" со стеклянным окошком. Именно сюда и фокусируется отраженный от оригинала свет. Матрица не прекращает работать все то время, пока лафет со сканирующей кареткой, приводимый шаговым электродвигателем, совершает путь от начала планшета, до его конца. Замечу, что общая дистанция движения лафета по направлению "Y" называется частотой сэмплирования или механическим разрешением сканера (об этом мы поговорим чуть позже). За один шаг матрица целиком захватывает горизонтальную линию планшета, которая называется линией растра. По истечении времени, достаточного для обработки одной такой линии, лафет сканирующего блока перемещается на небольшой шаг, и наступает очередь для сканирования следующей линии, и т.д.
Самый важный элемент сканера – CCD-матрица
|
Вид сбоку на CCD-матрицу |
На виде сбоку можно заметить два обычных винта, которые выполняют "деликатную" роль". С их помощью на этапе сборки сканера производилась точная юстировка матрицы (обратите также внимание на П-образные прорези в печатной плате на виде сверху), чтобы падающий на нее отраженный свет от зеркал ложился бы равномерно по всей ее поверхности. Кстати, в случае перекоса одного из элементов оптической системы воссозданное компьютером изображение окажется "полосатым".
На увеличенной фотографии CCD-матрицы достаточно хорошо видно, что CCD-матрица оснащена собственным RGB-фильтром. Именно он и представляет собой главный элемент системы разделения цветов, о чем многие говорят, но мало кто представляет, как на самом деле это работает. Обычно, многие обозреватели ограничиваются стандартной формулировкой: "стандартный планшетный сканер использует источник света, систему разделения цветов и прибор с зарядовой связью (CCD) для сбора оптической информации о сканируемом объекте". На самом деле, свет можно разделить на его цветовые составляющие, а затем сфокусировать на фильтрах матрицы. Столь же немаловажным элементом системы разделения цветов является объектив сканера.
Корпус
Корпус сканера должен обладать достаточной жесткостью, чтобы исключить возможные перекосы конструкции. Безусловно, лучше всего, если основа сканера представляет собой металлическое шасси. Однако корпуса большинства выпускаемых сегодня сканеров для дома и офиса, в целях снижения стоимости, полностью сделаны из пластмассы. В этом случае, необходимую прочность конструкции придают ребра жесткости, которые можно сравнить с нервюрами и лонжеронами самолета.
Оптическая система сканера не терпит пыли, поэтому корпус аппарата должен быть герметичным, без каких-либо щелей (даже технологических).
Края планшета должны иметь пологий спуск – это облегчает задачу по быстрому извлечению оригинала со стекла. Кроме того, между стеклом и планшетом не должно быть никакого зазора, который препятствовал бы извлечению оригинала.
Блок управления
Все сканеры управляются с персонального компьютера, к которому они подключены, а необходимые настройки перед сканированием задаются в пользовательском окне управляющей программы. По этой причине, сканерам для дома и офиса совсем не обязательно иметь собственный блок управления. Однако многие производители идут навстречу самым неподготовленным пользователям, и устанавливают (обычно на лицевую панель) несколько кнопок "быстрого сканирования".
Кнопки быстрого сканирования – элемент, без
которого можно обойтись
Основным методом перевода бумажных документов в электронную форму является сканирование графический образ сканером .
Сканер
универсальные и специальные .
Универсальные сканеры обеспечивают ввод текстовой и графической информации в цветном или черно-белом формате. Среди универсальных сканеров выделяются следующие виды:
· Ручной сканер – самый простой вид сканеров, дающий наименее качественное изображение. Такой сканер не имеет движущихся частей, и сканирование производится путем перемещения сканера над поверхностью документа вручную. Их недостатком является очень узкая полоса сканирования (стандартный лист бумаги приходится сканировать в несколько проходов), а также высокие требования к самому процессу сканирования.
· Листовой сканер – позволяет за одну операцию сканировать лист бумаги стандартного формата. По конструкции напоминает факс-аппарат: оригинал втягивается внутрь специальными роликами (как в принтере) и сканируется по мере перемещения мимо неподвижной светочувствительной матрицы. Обеспечивая высокое качество сканирования, эти сканеры не позволяют обрабатывать книги и журналы без их разброшюровки на отдельные страницы.
· Планшетный сканер – наиболее универсальное устройство, подходящее под большинство задач и позволяющее сканировать любые документы (отдельные листы, книги, журналы и т.д.). Под крышкой сканера располагается прозрачное основание, на которое кладется документ. Блок сканирования перемещается вдоль документа внутри корпуса сканера. Продолжительность сканирования стандартного машинописного листа составляет от одной до нескольких секунд. Планшетные сканеры обеспечивают наилучшее качество и максимальное удобство при работе с бумажными документами.
Многие модели планшетных сканеров имеют возможность установки автоматического загрузчика документов из пачки, а также подключения слайд-модуля, осуществляющего «оцифровку» слайдов и негативных фотопленок для задач профессиональной фотографии или полиграфии.
Специальные типы сканеров предназначены для выполнения специальных функций. К ним относятся следующие:
· Барабанные сканеры обеспечивают наивысшее разрешение сканирования. Оригинал закрепляется на барабане при помощи специальных зажимов, либо при помощи смазки, а сканирование производится построчным перемещением объектива вдоль вращающегося со скоростью порядка 1000 оборотов в минуту барабана. Использование галогенного источника света, световой поток от которого концентрируется на точечной области барабана, позволяет исключить влияние помех и обрабатывать весь спектр оригиналов с высочайшим качеством.
· Сканеры форм - специальные сканеры для ввода информации с заполненных бланков. Это разновидность листовых сканеров. С помощью подобных устройств вводят данные из анкет, опросных листов, избирательных бюллетеней. От сканеров этого типа требуется не высокая разрешающая способность, а очень высокое быстродействие. В частности, для сканеров этого типа автоматизируют подачу бумажных листов в устройство.
· Штрих-сканеры - разновидность ручных сканеров, предназначенных для считывания штрих-кодов с маркировки товаров в магазинах. Штрих-сканеры позволяют автоматизировать процесс подсчета стоимости покупок. Они особенно удобны в торговых помещениях, оборудованных электронной связью и производящих расчеты с покупателями с помощью электронных платежных средств (кредитных карт, смарт-карт и т.п.).
· Слайдовый сканер - специализированный вариант планшетного сканера, разработанный для оцифровки слайдов и негативных фотопленок для задач профессиональной фотографии или полиграфии. Слайд или пленка вставляется в приемную щель и перемещается между лампой подсветки и объективом. Параметры выходного изображения достаточны для фотоальбома или полиграфического воспроизведения.
Несмотря на такое разнообразие видов сканеров, устройство и принципы их работы во многом схожи. В качестве примера рассмотрим, как работает планшетный сканер, упрощенная структурная схема которого приведена на рис. 10.
Основными элементами планшетного сканера являются:
· подложка (крышка) – закрывает оригинал, с которого производится сканирование. Изготовляется из черного материала, максимально поглощающего видимую часть спектра, чтобы предотвратить появление на результирующем изображении всевозможных бликов света, отраженного от размещенных за оригиналом предметов;
·
стекло
, на котором размещается сканируемый оригинал;
· светодиодная матрица – набор датчиков (светочувствительных элементов), расположенных в одну линию для черно-белого сканирования или в три линии для сканирования в цвете за один проход. В качестве светочувствительных элементов используются приборы с зарядовой связью (ПЗС – CCD – Charge Coupled Device ). Основное назначение матрицы ПЗС – разделить световой поток на три составляющих (красную, зеленую и синюю) и преобразовать уровень освещенности в уровень напряжения;
· оптическая система – состоит из объектива и зеркал (или призмы) и предназначена для проецирования светового потока, отраженного от сканируемого оригинала, на светодиодную матрицу, осуществляющую разделение информации о цветах. Обычно используется один фокусирующий объектив (или линза), который проецирует полную ширину области сканирования на полную ширину матрицы ПЗС;
· лампа – источник света, располагаемая на движущейся каретке и освещающая сканируемую страницу. В современных моделях используются лампы с холодным катодом (Cold Cathode Lamp ), обеспечивающие световой поток заданной интенсивности и имеющие повышенные характеристики долговечности. Ориентированные на профессиональную работу с цветом, сканеры содержат схемы самокалибрации по интенсивности светового потока от лампы и поддержания стабильности светового потока при изменении температуры;
· шаговый двигатель – обеспечивает перемещение оптического блока , в который входят лампа, оптическая система и светодиодная матрица;
· блок усиления сигналов – усиливает аналоговые напряжения с выходов матрицы ПЗС, осуществляет их коррекцию и обработку;
· аналого-цифровой преобразователь (АЦП ) – преобразует аналоговые напряжения в цифровой код;
· контроллер сканера – обеспечивает прием команд от компьютера и выдачу ему полученных цифровых кодов.
Процесс сканирования достаточно прост. Оригинал (лист документа, развернутая книга и т.п.) располагается на прозрачном неподвижном стекле и закрывается крышкой. При подаче с компьютера команды на сканирование включается лампа и сканирующая каретка с оптическим блоком начинает перемещаться вдоль листа. Яркий свет от лампы падает на сканируемый оригинал, а затем, отражаясь от него, световой поток фокусируется оптической системой и поступает на приемник сигнала – матрицу ПЗС, которая порознь воспринимает красную, зеленую и синюю составляющие спектра. Полученные на выходе матрицы ПЗС аналоговые напряжения, пропорциональные спектральным составляющим, усиливаются и подаются в аналого-цифровой преобразователь, который и осуществляет цифровое кодирование. С АЦП информация выходит в «знакомом» компьютеру двоичном виде и, после обработки в контроллере сканера через интерфейс с компьютером поступает в драйвер сканера – обычно это так называемый TWAIN -модуль, с которым уже взаимодействуют прикладные программы.
! Для того, чтобы увидеть принцип работы планшетного сканера, оденьте наушники и выполните двойной щелчок мышью по этому рисунку:
Основные параметры и характеристики сканеров:
1. Разрешение сканирования (Scanning Resolution ) характеризует величину самых мелких деталей изображения, передаваемых при сканировании без искажений. Измеряется обычно в dpi (dot per inch ) - числе отдельно видимых точек на дюйм изображения. Существует несколько видов разрешения, указываемого производителем сканеров.
· Оптическое разрешение определяется плотностью элементов в ПЗС-линейке и равно количеству элементов ПЗС-линейки, деленному на ее ширину. Оно является самым важным параметром сканера, определяющим детальность получаемых с его помощью изображений. В массовых моделях планшетных сканеров обычно оно бывает равно 600 или 1200 dpi. Сканирование всегда следует выполнять с разрешением, кратным оптическому, при этом интерполяционные искажения будут минимальны.
· Механическое разрешение определяет точность позиционирования каретки с ПЗС-линейкой при перемещении вдоль изображения. Механическое разрешение обычно в 2 раза больше оптического.
· Интерполяционное разрешение получается путем 16-кратного программного увеличения изображения. Оно не несет в себе абсолютно никакой дополнительной информации об изображении по сравнению с реальным разрешением, причем в специализированных пакетах операция масштабирования и интерполяции выполняется зачастую качественнее, чем драйвером сканера.
2. Глубина цвета, илиразрядность (Color Depth ) характеризует количество бит, применяемых для хранения информации о цвете каждого пиксела. Черно-белые сканеры имеют один разряд, монохромные, как правило, 8 разрядов, а цветные сканеры, как минимум, 24 разряда (по 8 бит на хранение каждой из RGB-компонент цвета пиксела). Количество цветов, воспроизводимых 24-х-битным сканером (8 бит на канал) равно 2 24 = 16 777 216. Более совершенные сканеры могут иметь разрядность 30 или 36 (по 10 или 12 бит на каждый канал). При этом их внутренняя разрядность может быть выше внешней: «лишние» разряды используются для выполнения цветовой коррекции изображения до передачи в компьютер, хотя такая практика в основном характерна для дешевых моделей. Профессиональные и полупрофессиональные сканеры имеют и внешнюю разрядность 30, 36, 42 бит или выше.
3. Диапазон оптических плотностей (Optical Density Range ) – это динамический диапазон сканера, который во многом определяется его разрядностью. Он характеризует возможность сканера правильно передавать изображения с большим или с очень маленьким разбросом яркости (возможность отсканировать «фото черной кошки в темной комнате»). Вычисляется как десятичный логарифм от отношения интенсивности падающего на оригинал света к интенсивности отраженного света, и измеряется в ОD (Optical Density ) или просто D : 0,0 D соответствует идеально белому цвету, 4,0 D - идеально черному. У сканера этот диапазон зависит от разрядности: у 36-битного сканера он не превышает 3,6 D, у 30-битного - 3,0 D. Сканируемые изображения обычно обладают диапазоном до 2,5 D для фотографий и 3,5 D для слайдов. Дешевые 24-битные планшетные сканеры имеют динамический диапазон 1,8-2,3 D, хорошие 36-битные - до 3,1-3,4 D.
4. Размер области сканирования . Для планшетных сканеров наиболее распространены форматы A4 и A3, для рулонных сканеров - A4, а для ручных сканеров область сканирования составляет обычно полосу шириной 11 см.
5. Соответствие цветов оригинального изображения его цифровой копии . На сегодняшний день одна из самых распространенных систем управления точностью цветопередачи та, что основана на профилях International Color Consortium (ICC ), описывающая особенности цветопередачи различных устройств. Процесс создания профиля ICC базируется на сканировании специально изготовленной тестовой таблицы и сравнении полученных результатов с эталоном. По результатам и определяются характеристики устройства, учитываемые драйвером и приложениями. В дорогих моделях сканеров применяются специальные программно-аппаратные системы для цветокалибровки.
6. Качество драйвера . Все современные сканеры обмениваются данными с прикладными программами под Windows с помощью программного интерфейса TWAIN , однако предоставляемый драйвером набор функций может быть разным, его обязательно следует уточнить при выборе сканера. Среди них наиболее важны:
· возможность предварительного просмотра изображения с выбором области сканирования и количества цветов;
· возможность регулировки яркости, контраста и нелинейной цветовой коррекции;
· возможность подавления муара при сканировании изображений с печатным растром;
· возможность простейших преобразований изображения (инверсия, поворот и т.п.);
· возможность сетевого сканирования;
· возможность режимов автоматической коррекции контраста и цветопередачи;
· возможность работы сканера (в сочетании с принтером) в режиме копира;
· возможности по цветокалибровке как сканера, так и всей системы;
· возможности по пакетному сканированию;
· возможности тонкой настройки фильтров и параметров цветокоррекции.
7. Количество и качество прилагаемого к сканеру ПО. Традиционно в комплекте со сканерами поставляются ПО обработки изображений (Adobe PhotoDeluxe или Photoshop LE , ULead Photo Impact и др.) и программа оптического распознавания текста (OCR - Optical Character Recognition ). В комплект ПО обычно входят две таких программы: англоязычная (Xerox TextBridge или Caere OmniPage Pro ) и предназначенная для распознавания русских текстов программа OCR - одна из версий FineReader производства ABBY Software .
Высококачественные профессиональные и полупрофессиональные планшетные сканеры производят компании Agfa , Linotype-Hell , Microtek (ряд моделей известны под OEM-логотипом NeuHouse), Umax ; рассчитанную на массового пользователя технику выпускают компании Artec , Epson , Genius , Hewlett-Packard , Mustek , Plustek , Primax и др.
Для различных типов сканеров в табл. 3 приведены типовые значения указанных параметров.
Таблица 3. Значения параметров основных типов сканеров
Для подключения сканеров в настоящее время применяют следующие интерфейсы:
· собственный (Proprietary ) интерфейс разработчика сканера, применявшийся в ранних моделях планшетных и ручных сканеров и представлявший собой специализированную плату на шине ISA , для работы которой требовался драйвер;
· с параллельным портом EPP (LPT , или ECP ) выпускаются самые младшие модели в семействах планшетных сканеров различных производителей. Сканеры с таким интерфейсом имеют, как правило, посредственные характеристики и рассчитаны на выполнение несложных работ;
· интерфейс SCSI является стандартом для подключения высококачественных и высокопроизводительных устройств, обеспечивает межплатформенную совместимость сканера и его малую зависимость от смены операционной системы. К SCSI-сканерам обычно прилагается SCSI-плата на шине ISA , хотя такой сканер можно подключать и к полнофункциональным SCSI-контроллерам на шине PCI . Большинство 30- и 36-разрядных сканеров с разрешением 600 dpi и выше выпускаются с этим интерфейсом;
· интерфейс USB - это интерфейс для подключения сканеров, активно рекомендуемый спецификациями PC98 и PC99 . Удобство единого интерфейса для разных устройств и достаточно высокая пропускная способность привели к тому, что большинство сканеров для непрофессионального применения выпускаются именно с этим интерфейсом.
Для ввода данных в системах трехмерного моделирования и автоматизированного проектирования (САПР, или CAD/CAM - Computer-Aided Design/Modeling ) используется графический планшет (Digitizer – дигитайзер) - кодирующее устройство, позволяющее вводить в компьютер двумерное, в том числе и многоцветное, изображение в виде растрового образа.
В состав графического планшета входит специальный указатель (перо) с датчиком. Собственный контроллер посылает импульсы по расположенной под поверхностью планшета сетке проводников. Получив два таких сигнала, контроллер преобразует их в координаты, передаваемые в ПК. Компьютер переводит эту информацию в координаты точки на экране монитора, соответствующие положению указателя на планшете. Планшеты, предназначенные для рисования, обладают чувствительностью к силе нажатия пера, преобразуя эти данные в толщину или оттенок линии.
Для подключения планшета обычно используется последовательный порт. Распространенными параметрами являются разрешение порядка 2400 dpi и высокая чувствительность к уровням нажатия (256 уровней). Графические планшеты и дигитайзеры производят компании CalComp , Mutoh , Wacom и другие.
Для устройств рукописного ввода информации характерна такая же схема работы, только введенные образы букв дополнительно преобразуются в буквы при помощи специальной программы распознавания, а размер площадки для ввода меньше. Устройства перьевого ввода информации чаще используются в сверхминиатюрных компьютерах PDA (Personal Digital Assistant ) или HPC (Handheld PC ), в которых нет полноценной клавиатуры.
ВЫВОДЫ
1. Клавиатура является основным устройством ввода информации в ПК. Она представляет собой совокупность механических датчиков, воспринимающих давление на клавиши и замыкающих определенную электрическую цепь. Наиболее распространены два типа клавиатур: с механическими и с мембранными переключателями .
Все клавиши разбиты на группы: буквенно-цифровые клавиши , предназначенные для ввода текстов и чисел; клавиши управления курсором (эта группа клавиш может быть использована также для ввода числовых данных, просмотра и редактирования текста на экране); специальные управляющие клавиши (переключение регистров, прерывание работы программы, вывод содержимого экрана на печать, перезагрузка ОС ПК и др.); функциональные клавиши , широко используемые в сервисных программах в качестве управляющих клавиш.
Наиболее распространенным стандартом расположения символьных клавиш является раскладка QWERTY (ЙЦУКЕН ), которая при желании может быть перепрограммирована на другую.
2. Для управления курсором удобным средством является устройство, называемое мышью . Подавляющее число компьютерных мышей используют оптико-механический принцип кодирования перемещения . В переносных ПК вместо мыши используюттрекбол,тачпад,трекпойнт.
3. Для визуального отображения информации используется видеосистема компьютера, включающая монитор (дисплей), видеоадаптер и программное обеспечение (драйверы видеосистемы).Монитор (дисплей) – это устройство визуального отображения текстовой и графической информации на экране кинескопа (электронно-лучевой трубке – ЭЛТ) или жидкокристаллическом экране (ЖК-экране).
К основным параметрам мониторов относятся: кадровая частота монитора, частотастрок, полоса видеосигнала, способ формирования изображения, размерзерна люминофора экрана монитора, разрешающая способность монитора, типоразмер экрана монитора.
Видеоадаптер (видеокарта , видеоконтроллер ) – это внутрисистемное устройство ПК, предназначенное для хранения видеоинформации и ее отображения на экране монитора. Он непосредственно управляет монитором, а также процессом вывода информации на экран с помощью изменения сигналов строчной и кадровой развертки ЭЛТ монитора, яркости элементов изображения и параметров смешения цветов.
4. Принтеры (печатающие устройства) – устройства вывода данных из ЭВМ, преобразующие информационные ASCII-коды в соответствующие им графические символы (буквы, цифры, знаки и т.п.) и фиксирующие эти символы на бумаге.
Принтеры разнятся между собой по различным признакам: по цветности – черно-белые и цветные; по способу формирования символов – знакопечатающие и знакосинтезируюшие; по принципу действия – матричные, термические, струйные, лазерные; по способу печати – ударные, безударные; по способам формирования строк – последовательные, параллельные; по ширине каретки – с широкой (375-450 мм) и узкой (250 мм) кареткой; по длине печатной строки – 80 и 132-136 символов; по набору символов – вплоть до полного набора символов ASCII; по скорости печати ; по разрешающей способности .
5. Основным методом перевода бумажных документов в электронную форму является сканирование - технологический процесс, в результате которого создается графический образ бумажного документа, как бы его «цифровая фотография». Сканирование осуществляется с помощью специального устройства, называемого сканером .
Сканер – это оптико-электронно-механическое устройство, которое предназначено для преобразования визуального образа бумажного документа в графический файл, сохраняющий растровое изображение исходного документа и предаваемый в компьютер для последующей обработки (распознавания, редактирования и т.п.).
По своему предназначению сканеры делятся на универсальные (ручные, листовые и планшетные) и специальные (барабанные, сканеры форм, штрих-сканеры, слайдовые сканеры).
Основные характеристики сканеров: разрешение сканирования (оптическое, механическое и интерполяционное), глубина цвета (разрядность), диапазон оптических плотностей, размер области сканирования, соответствие цветов оригинального изображения его цифровой копии, качество драйверов и прилагаемого программного обеспечения.
Фотограмметрия – (photos-свет, gramma-запись, metreo-измерения) научная дисциплина, связанная с определением геометрических параметров (формы размеры пространственного положения и других св-в объектов по их изображению)
Дистанционное зондирование – получение информации об объекте по данным измерений сделанных на расстоянии от объекта, т.е без прямого контакта с ним.
Достоинство данных дистанционного зондирования:
Цифровой вид информации
Объективность и достоверность
Обзорность
Оперативность
Регулярность и периодичность поступления информации
Разнообразие по разрешению и видам съемки
Возможность исследования медленно протекающих и скоротечных процессов
Недостатки данных дистанционного зондирования:
Наличие геометрических, радиометрических и прочих искажений
Перенасыщенность информации
Наличие белых пятен
Методы ДЗ:
Пассивный
Съемочная система фиксирует либо отраженную объектом солнечную энергию, либо собственное излучение объекта
Активный
Съемочная система испускает сигнал собственного источника энергии, а затем фиксирует его отраженную объектом часть
Съемочные системы
Классификация съемочных систем:
В зависимости от приемника различают:
Фотографическое изображение
Изображение формируется оптическим способом на фотопленке, а видимое изображение получается после фотохимической обработки (проявка и печать)
Цифровое изображение
Приемником излучения яв-ся матрицы или линейки ПЗС (приборы с зарядовой связью)
По методу получения изображения:
Фотографические
Оптико – механические сканерные системы
Оптико – электронные сканерные системы
Радиолокационные съемочные системы
Лазерные сканерные съемочные системы
Пассивные
Активные
Фотографические съемочные системы
В фотографической СС снимок формируется практически мгновенно, по законам центральной проекции.
Классификация фотоапапаратов:
Одно-объективные
Много-объективные
Панорамные
По величине угла зрения:
Узкоугольные (τ < 50°)
Нормальны (50° < τ < 90°)
Широкоугольные (90° < τ < 110°)
Сверх широкоугольные (τ > 110°)
По величине фоккусного расстояния:
Коротко-фокусные (f < 100 мм)
Нормальные (100 мм < f < 300мм)
Длиннофокусные (f > 300 мм)
Оптико – механические сканерные системы
Оптико – механические сканер – содержит только 1 технический элемент (датчик), который позволяет измерять яркость небольшого участка (пикселя) земной поверхности
Вращающееся зеркало просматривает полосу местности, что позволяет зарегистрировать яркость целого ряда пикселей земной поверхности за короткий промежуток времени, т.е сформировать строку изображения.
Следующая строка изображения формируется за счет движения носителя.

Если единственный датчик заменить линейкой, можно получить многоканальное изображение.
Тепловую составляющую излучения можно получить при помощи полу прозрачного зеркала.


Оптико – электронные сканерные системы
Изображение построенное при помощи оптико – электронных сканеров проектируется на линейное, либо матричное множество ПЗС.

Радио локационные сканерные системы
Взаимный импульс от передатчика установленного на носителе излучается направленной антенной формирующий веерообразный луч в вертикальной плоскости.
Часть отраженной энергии регистрируется приемником, установленном там же, где и передатчик. В результате образуются сигналы, которые управляют яркостью светового пятна электронно-лучевой трубки. Совокупность таких пятен образует строку радио-локационного изображения, а время прохождение сигнала определяет расстояние до объекта.
Диапазоны длин волны:
Х полоса (𝜆=2,4 – 3,8 см)
С полоса (𝜆=3,8 – 7,5 см)
L полоса (𝜆=15 – 30 см)
Лазерные съемочные системы
Лазер – усиление света по средством вынужденного излучения, т.е это устройство преобразующее энергию накачки в энергию монохроматического и узко направленного потока излучений.
Одиночные снимки

Е – предметная плоскость (плоскость местности) - Горизонтальная плоскость, проходящая через какую-либо точку местности
S – точка фотографирования (центр проекции)
n – Плоскость наилучшего изображения
So ′ - главный луч
f – фокусное расстояние – расстояние от S до o′
p – плоскости снимка
o – главная тоска снимка
a , b – малое изображение точек A и B
O – Точка на местности соответствующая главной точке
Связка лучей – совокупность всех проектирующих лучей
Главный луч - Луч совпадающий с оптической осью камеры
Н ф – высота фотографирования – расстояния от точки фотографирования S до предметной плоскости Е.
–основная формула определения масштаба

n – точка надира – точка пересечения отвесной линии проведенной через точку фотографирования и отвесной линией
N – точка на местности соответствующая точке надира
α° - суммарный угол наклона снимка
с – точка нулевых искажений – точка пересечения биссектрисы угла наклона снимка и плоскости снимка
С – точка на местности соответствующая точке нулевых искажений

Tt – линия основания – линия пересечения плоскости Е и плоскости p
Q – плоскость главного вертикала –вертикальная плоскость проходящая через главный луч
Vv – главная вертикаль – линия пересечения плоскости главного вертикала и плоскости снимка
VV – линия направления съемки – линия пересечения предметной плоскости и плоскости главного вертикала (Q и Е)
Е′ - плоскость действительного горизонта - горизонтальная плоскость, проведенная через точку фотографирования
ii – линия действительного горизонта – линия пересечения плоскости действительного горизонта и плоскости p.
I – главная точка схода – точка пересечения действительного горизонта и главной вертикали VV
qq – главная горизонталь – прямая в плоскости снимка проведенная через главную точку перпендикулярная главной вертикали
h c h c – линия нулевых искажений – прямая в плоскости снимка проходящая через точку нулевых искажений параллельно главной горизонтали qq.