Pour les utilisateurs de contrôleurs APM pour superposer les données de télémétrie, un dispositif spécial- Mini OSD. L'abréviation OSD vient de l'anglais On Screen Display, ce qui signifie afficher des informations supplémentaires sur l'écran de l'opérateur.
Les fabricants chinois fabriquent les deux contrôleurs de vol - HKPliot Mega, ArduFlyer et les contrôleurs OSD - MAVLink-OSD.

Extérieurement, Minim OSD n'est pas très différent de MAVLink-OSD, c'est comme une copie miroir de la carte, où la puce principale est tournée de 45 degrés. De plus, MAVLink-OSD n'a pas de cavaliers pour sélectionner le type de signal vidéo et combiner la puissance des parties numériques et analogiques.
Minim OSD v1.0 avait des problèmes de surchauffe lors de l'utilisation d'une alimentation de caméra 12 volts, ce problème a été résolu dans la version v1.1.
En raison du fait que HK avait des problèmes de livraison fin 2013, j'ai commandé MAVLink-OSD à RCTimer.

Pour la programmation, vous aurez certainement besoin d'un adaptateur FTDI. Par conséquent, avec MAVLink-OSD, j'ai immédiatement pris l'adaptateur FTDI Tool V1.0 http://www.rctimer.com/product_684.html .

Pour configurer et flasher l'appareil, vous aurez besoin d'un logiciel spécial appelé ArduCam-OSD. Télécharger dernière version Logiciel ArduCam-OSD et le firmware peuvent être trouvés ici http://code.google.com/p/arducam-osd/downloads/list . Sur le ce moment version actuelle 2.0.
Vous pouvez également installer firmware alternatif, le projet s'appelle minimosd-extra. Les informations se trouvent ici https://code.google.com/p/minimosd-extra/ . Pour le firmware, vous aurez besoin de votre propre utilitaire - MinimOSD-Extra Config Tool. En règle générale, l'archive contient un utilitaire et un micrologiciel. Vous pouvez le télécharger ici https://code.google.com/p/minimosd-extra/downloads/list . Les yeux courent du nombre de versions.
J'ai enveloppé la carte et l'adaptateur dans du film rétractable.
Le connecteur du contrôleur pour la connexion est très peu pratique, à six broches, sans protection «à toute épreuve». Toutes les broches sont utilisées pour la programmation, mais seulement 4 broches sont utilisées pour se connecter au contrôleur de vol.
Pour la programmation, il reste à trouver un câble mini-USB.

Quant au connecteur à quatre broches, tout est plus compliqué ici. S'ils sont mélangés et mal connectés, de la fumée peut sortir.
Connecte l'OSD au contrôleur de vol dans le connecteur de télémétrie. Le fil vers l'OSD doit être connecté aux broches centrales : GND, VCC, RX, TX.
Si nous utilisons un modem radio, nous le connectons en parallèle. J'ai donc dû souder le câble en Y.

La photo montre le fil du contrôleur AIOP, dans lequel le GPS est également connecté à un connecteur.
Je n'ai pas retiré le fil allant au TX de mon OSD, pour qu'il soit universel, on ne sait jamais où je vais encore utiliser ce fil.
Il est à noter que si vous n'appliquez pas 5 volts sur la partie analogique de la carte, la carte sera silencieuse.

Certaines ressources proposent de refaire la carte et d'alimenter la partie analogique à partir de la partie numérique, mais je ne l'ai pas fait, car il existe un avis selon lequel des interférences peuvent apparaître.
Pour ceux qui décident de se connecter à partir d'une seule source d'alimentation, le circuit sera comme indiqué sur la photo.

J'ai actuellement la partie analogique alimentée par un émetteur vidéo, dont j'ai déjà parlé dans mon précédent article.
Configuration OSD ArduCAM
Commençons par l'utilitaire natif ArduCAM OSD Config. Pour le moment, la version actuelle est 2.1.2.0.
Parmi les éléments principaux, le menu du programme doit être mis en évidence, ainsi que trois onglets qui basculent entre les écrans suivants : Config, Panel 1, Panel 2.
Config, tout est très clair ici.
Tout d'abord, sélectionnez le numéro de port et cliquez sur le bouton Lire depuis l'OSD.

Il convient de noter que le type de signal vidéo NTSC - PAL est commuté via le menu Programmes vidéo mode. L'élément de menu Fichier vous permet d'enregistrer et de charger vos paramètres, ou d'accéder aux paramètres par défaut. Dans le menu Options, vous pouvez activer le mode grille pour Panel1 et 2, mettre à jour le firmware, sélectionner l'image d'arrière-plan, utiliser le journal pour les paramètres, ajouter vos propres polices.

Le panneau 1 est utilisé pour personnaliser les informations affichées sur la vidéo pour le premier écran. La commutation de canal est définie sur un canal de commande radio libre OSD Toggle Channel.

En conséquence, pour le deuxième écran, nous avons configuré le panneau 2.

Le micrologiciel est mis à jour à l'aide du même utilitaire.

Outil de configuration MinimOSD-Extra
Lorsque nous ouvrons le programme MinimOSD-Extra Config Tool, il semble que nous ayons mélangé les dossiers et relancé ArduCAM OSD Config. C'est la première impression, c'est en fait très similaire, mais il y a plus de réglages.
Regardons les principales différences.
Le premier élément est le choix du type de modèle : Avion, Copter.
Ajout d'une option pour basculer automatiquement l'écran vers celui spécifié dans le menu déroulant (Avertissements Auto Panel Switch) lorsqu'un avertissement se produit. Cela est nécessaire lorsque, par exemple, toutes les informations sont supprimées sur le deuxième écran afin que rien n'interfère avec la vue.
Vous pouvez choisir d'afficher la batterie en pourcentage ou en mA.
Et un autre bloc Afficher le signe avant la valeur, qui est responsable de l'affichage des icônes avant les valeurs.

Premier écran

Deuxième écran

résultats
J'ai d'abord installé le firmware via ArduCAM OSD Config.

Tout était normal en principe, mais une nuance dérangeait, qui s'exprimait dans ce qui suit.
Après avoir connecté l'appareil, j'ai remarqué sur l'écran que certaines informations à gauche étaient coupées. Les icônes devant les valeurs des paramètres manquent à moitié. J'ai décidé d'essayer de changer le type de signal en PAL, en conséquence c'était encore pire, ça coupait le haut et le bas de l'écran, alors je l'ai renvoyé en NTSC. Que ce soit d'un seul côté, et non de trois, d'autant plus que vous pouvez essayer de corriger cette lacune à gauche.

Les informations déplacées bloquent un caractère vers la droite.

L'opération était indolore, il y avait assez d'espace pour cela.


Du coup, tout a fonctionné, les icônes sont désormais parfaitement visibles, les informations sont parfaitement lisibles à l'écran.
Mais le micrologiciel MinimOSD-Extra 2.4 R726 a été installé, mais il a commencé à donner une sorte de disgrâce à l'écran.

L'image devenait illisible, les informations étaient confuses sur tout l'écran.

téléchargé plus première version 2.2.

Avec cette version du firmware, les informations ont commencé à s'afficher sans distorsion.

conclusions
Appareil compact et pas cher. Suffisamment polyvalent pour être utilisé avec les cartes ArduPilot Mega (APM) d'origine et ses clones HKPILOT Mega, ArduFlyer, ainsi qu'avec les contrôleurs de la série AIO (All-In-One) avec micrologiciel MPNG ou MultyWii. Il y a des informations sur les forums sur la connexion aux contrôleurs DJI Naza, mais cela nécessite de travailler avec un fer à souder entre les mains.
Le seul point négatif est le connecteur à six broches sur la carte, dans lequel nous connectons le câble avec le connecteur à quatre broches. Il peut y avoir de nombreuses variantes, si vous faites une erreur, vous pouvez brûler le tableau, car il n'y a aucune protection.
Il faut également penser à alimenter les parties numériques et analogiques de la carte, sinon cela ne fonctionnera pas. Quelle méthode de nutrition choisir, ici ce sera plus pratique pour quelqu'un.
Bien sûr, j'ai plus aimé MinimOSD-Extra, car il vous permet d'effectuer des réglages supplémentaires qui ne sont pas dans ArduCam OSD Config. Mais il s'est avéré que nous devons encore trouver une version stable. Je suis tombé sur le fait qu'avec certains micrologiciels, la sortie d'informations sur la vidéo est interrompue. j'ai réussi à trouver version de travail pas la première fois. Par conséquent, certaines options MinimOSD-Extra n'étaient pas disponibles pour moi. Malheureusement, c'est un inconvénient pour de nombreux projets open source.
Par conséquent, il convient de noter que la configuration ArduCam-OSD est plus stable et éprouvée.
Le contrôleur effectue une superposition d'informations de qualité sur la vidéo, le texte semble assez clair et facile à lire sur un petit écran. Je n'ai pas constaté de ralentissements dans l'affichage des informations.
Dans ce guide, nous couvrirons à la fois les versions standard et Micro, comment configurer et utiliser le micrologiciel MW-OSD, ainsi que comment se connecter au Naze32 et au récepteur.
Qu'est-ce que MinimOSD et Micro MinimOSD
Même si la configuration est beaucoup plus compliquée que d'autres OSD comme Super Simple OSD ou E-OSD que je branche et qu'ils fonctionnent tout de suite, MinimOSD a de nombreux avantages, et apparence L'écran est entièrement personnalisable.
Plus fonctionnalités utiles: Affichage des coordonnées GPS, styles et polices personnalisables, à l'aide du menu OSD, vous pouvez modifier les gains PID, les taux, etc. Un exemple de ce qui peut être affiché à l'écran.
Réglage des coefficients PID via le menu :

Dimensions, poids, brochage, soudure pour réduire les dimensions
MinimOSD pleine taille
Cet OSD existe depuis de nombreuses années. L'avantage de cette version (MinimOSD avec KV Mod) est qu'elle possède des broches sur le côté pour connecter un capteur de courant, RSSI, capteur de tension, etc. Auparavant, nous devions souder nous-mêmes très soigneusement les fils directement sur les pattes de la puce, ce qui était très difficile. Cette version a rendu la vie beaucoup plus facile. Je me suis acheté une telle carte (version 2)

Dimensions MinimOSD avec KV Mod V2 : largeur 21mm, longueur : 43mm, poids : 5.5g (connecteurs compris).
Micro Minim OSD
Je suis étonné de la taille micro de cet OSD, mais il possède toutes les fonctionnalités de la version pleine taille. En plus de la possibilité d'alimentation à partir de 12V, qui en ancienne version presque jamais utilisé, cause de surchauffe de la planche. Il était donc très raisonnable de supprimer cette fonctionnalité et de réduire la taille.

La version micro a environ 1/3 de poids et de taille.
Connecteurs à souder
Souder les connecteurs au MinimOSD pleine taille était facile et direct, mais pour la version micro, je n'aime pas la façon dont les gens les soudent habituellement.

Ma création : j'ai besoin d'utiliser des connecteurs coudés au lieu de connecteurs droits, j'ai donc un supplément place libre lorsqu'il est installé à l'intérieur du copter.
À la toute fin, nous emballons du thermorétractable pour protéger les soudures et les fils.
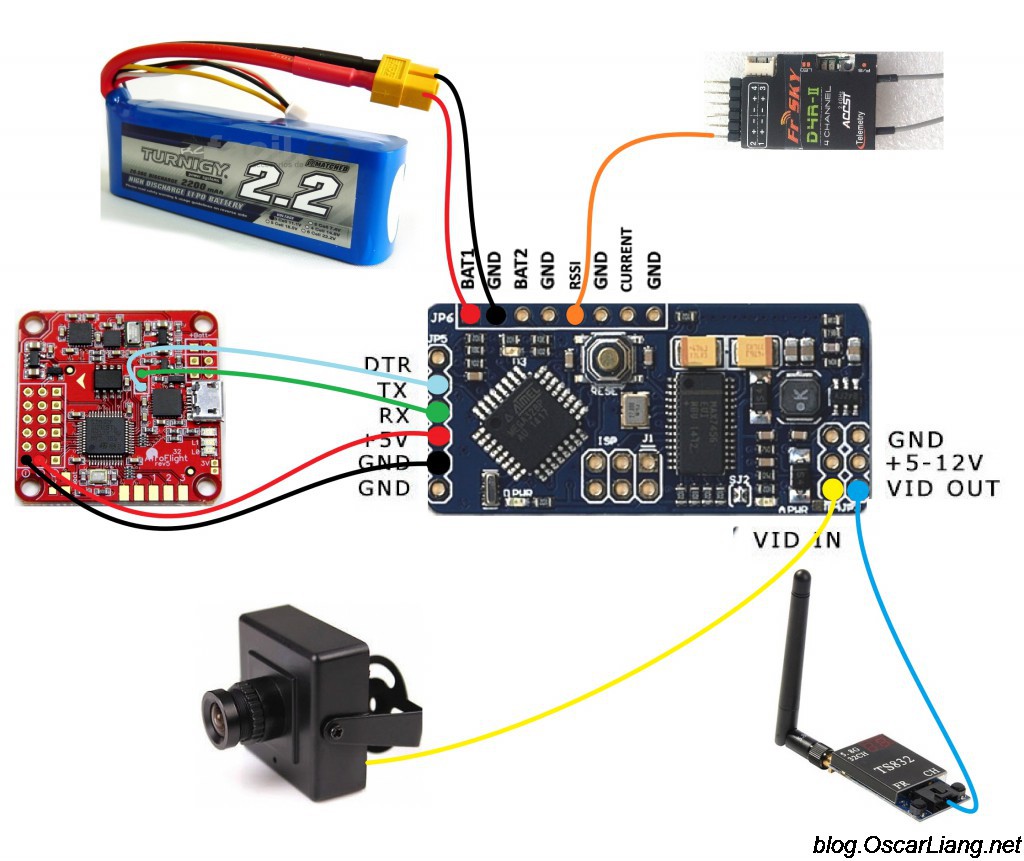
Connectez-vous à Naze32, batterie, récepteur, caméra, émetteur vidéo
Le montage de mon copter est très simple. Ici dans le schéma tout ce qui doit être connecté : Naze32, LiPo, récepteur, caméra FPV et émetteur vidéo.

Schéma de connexion d'un MinimOSD régulier avec Naze32, caméra, récepteur, émetteur vidéo, batterie.
Comment connecter la version micro :

Foire aux questions 1. Certains se plaignent que le texte disparaît lorsque la manette des gaz est augmentée. Solution : connectez tous les appareils électroniques - caméra, OSD, émetteur vidéo à une masse commune.
FAQ 2. L'OSD ne s'affiche pas, seule l'image de la caméra. Solution : essayez de changer la norme PAL/NTSC dans les paramètres OSD.
La broche VBAT1 est connectée au principal batterie au lithium pour afficher la tension. La broche RSSI est connectée au récepteur de contrôle pour afficher le niveau du signal (si le récepteur est FrSky D4R-II, en mode CPPM, alors Pin1 est le signal PPM, PIN2 est la sortie RSSI).
La connexion au Naze32 via le port série (TX et RX) permettra au Naze32 d'envoyer des données de vol à l'écran (GPS, cap compas, etc.) et l'OSD pourra modifier les coefficients PID du contrôleur de vol à l'aide du télécommande.
Faire attention! La connexion à l'ordinateur utilise le même port série, ce qui signifie que si vous souhaitez utiliser le configurateur Baseflight ou Cleanflight, vous devez d'abord désactiver TX et RX depuis l'OSD.
Sans connexion de port série, le MinimOSD affichera le RSSI et la tension par lui-même.
Si vous utilisez Taranis en mode PPM, veuillez lire cet article : comment obtenir RSSI sur un canal séparé (sans fils supplémentaires).
Voici à quoi ça ressemble à l'intérieur de mon mini quad.
Configuration avec l'interface graphique MW-OSD
Il existe pas mal de firmwares pour MinimOSD, mon préféré est Multiwii-OSD (mwosd). Version actuelle 1.3., son configurateur est très programme pratique. Le menu à l'écran est clair, le firmware est mis à jour, il y a un support pour Cleanflight et Baseflight. Il vous permet également de régler les gains PID directement depuis l'OSD.
Connectez MinimOSD au programmeur FTDI
La configuration et le micrologiciel nécessitent un adaptateur FTDI. La connexion passe par 5 fils : DTR (GRN), TX, RX, 5V et GND.


Configuration de MinimOSD à l'aide de l'interface graphique MW-OSD
À travers interface graphique Vous pouvez personnaliser l'affichage de toutes les données de vol. Car Je pilote un mini quad, tout ce dont j'ai besoin est la tension de la batterie, le RSSI et une minuterie. J'utilise des batteries au lithium 4S et l'avertissement de batterie faible est réglé sur 13,6 V (3,4 V par cellule, mais je devrais régler le seuil plus haut). Pour la configuration 3S, la tension à laquelle l'avertissement apparaît peut être réglée sur 11V. J'utilise FPV au format PAL

La seule chose dont il faut s'inquiéter est la tension de la batterie. La valeur par défaut est loin d'être idéale, vous devez donc jouer avec les paramètres pour obtenir la valeur correcte. Comment fait-on ça:
La valeur par défaut pour " réglage de tension" = 200, et la tension affichée par l'OSD était de 21,0 V. J'ai pris un multimètre, j'ai mesuré la tension de la batterie et j'ai obtenu 11,1 V

Diminuons maintenant la valeur réglage de la tension"jusqu'à 110, maintenant j'ai 11,5V sur l'écran OSD. Pour éviter des va-et-vient constants dans le paramètre, nous devons calculer la valeur exacte en utilisant les mathématiques et les informations que nous avons déjà 🙂 Nous devons calculer combien de volts 1 valeur du paramètre "réglage de tension" donne.
(21.0-11.5)/(200-110) = 9.5/90 = 0.1056
Nous savons que la valeur correcte à l'écran doit être de 11,1 V, donc la valeur " réglage de la tension"devrait être:
110 - (11,5-11,1) / 0,1056 = 106,21 (106 est bien)
Sens " réglage de la tension» peut être modifié non seulement dans le configurateur, mais également via le menu à l'écran, il n'est donc pas nécessaire de connecter MinimOSD à l'ordinateur et d'utiliser le configurateur.
Arduino comme programmeur pour MinimOSD ?
J'ai essayé d'utiliser mon Arduino UNO comme programmeur FTDI, comme je l'ai déjà fait pour d'autres appareils. J'ai réussi à modifier les paramètres OSD via le programme GUI MW-OSD. Cependant, j'ai rencontré un problème lors du flashage de MinimOSD, le message d'erreur était :
avrdude : stk500_getsync() : non synchronisé : resp=0x00.
Cela ressemble à une sorte de problème de synchronisation des données, mais je me suis assuré d'avoir correctement connecté le DTR à RESET sur la carte Arduino, je ne sais pas quoi faire d'autre, j'ai donc utilisé mon programmeur FTDI pour flasher le MinimOSD.
Menu OSD : configurer les PID, le taux, la tension, le RSSI
Le menu OSD est ma fonctionnalité préférée, et c'est essentiellement pourquoi j'ai abandonné SuperSimple OSD. Il existe de nombreux paramètres que vous pouvez modifier sans vous connecter à un ordinateur. Par exemple, je peux modifier les valeurs des coefficients PID directement sur le terrain à l'aide de ma télécommande, sans bluetooth et sans ordinateur ! Cependant, vous ne pouvez pas modifier les paramètres de taux de roulis et de taux de tangage séparément dans Cleanflight (anglais), au moment où ils sont liés (vous ne pouvez modifier les deux qu'à la fois, env. transl.) nouvelle version ces paramètres seront indépendants.
Pour accéder au menu MW-OSD, vous devez d'abord désarmer le copter, puis :
- gaz au milieu
- lacet (lacet) - droite
- pitch (tangage) - vers l'avant.
Pour naviguer dans le menu :
- Roll / pitch (tangage / roulis) - pour se déplacer dans le menu
- Yaw (lacet) - pour changer les valeurs
- PID Config (Roll/Pitch/Yaw PID pour différents modes de vol)
- Réglage RC (RC Rate, RC Expo, Pitch/Roll Rate, Yaw Rate, TPA (Throttle PID Att)
- Tension (afficher ou non la tension, "Régler la tension", "Alarme de tension", valeurs "Cellules")
- RSSI (afficher ou non)
- Courant (afficher le courant consommé ou non, son réglage)
- Avancé (unités : mètres/pouces, signal : PAL ou NTSC, boussole)
- Affichage (commutateurs, manette des gaz, coordonnées GPS, capteurs, cardan, etc.)
- Statistiques (distance, altitude max., vitesse max., temps de vol)
clignotant
Certains fournisseurs de MinimOSD flashent eux-mêmes la dernière version, vous n'avez donc pas à vous soucier du flashage. Mais peut-être que plus tard, vous voudrez mettre à jour le firmware ou en essayer un autre, pour vérifier la version du firmware, activer l'OSD sur le quad et regarder l'inscription sur l'écran de démarrage.
Chaque firmware dans les instructions décrit en détail comment flasher. Voici le résumé :
- Téléchargez les fichiers du micrologiciel.
- Télécharger l'IDE Arduino
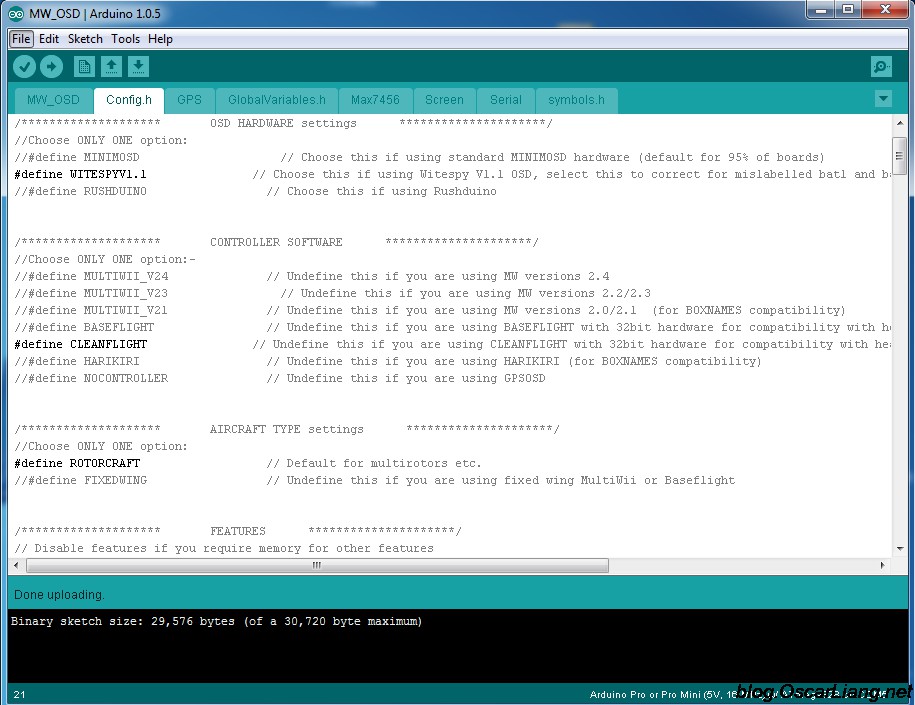
- Ouvrir les fichiers du micrologiciel dans l'IDE Arduino
- Modifier les paramètres si nécessaire
- Je n'ai pas beaucoup changé, seulement le type de carte (WitespyV1.1) et le firmware du contrôleur de vol (Cleanflight)
- Connectez l'adaptateur FTDI (programmeur) à MinimOSD / Micro MinimOSD
- Cliquez sur Compiler et télécharger
Dans l'article, nous envisagerons de connecter, flasher et configurer MinimOSD. Et nous répondrons également à la question de savoir quoi faire - si quelque chose s'est mal passé et quoi faire - pour que tout ne se termine pas tristement.
« Petka - appareils!?!? -Trois cents!!! -Qu'est-ce que trois cents ??? -Qu'en est-il des instruments?
MinimOSD. Foulard pas cher et très utile. Vous permet de voir ce qui se passe maintenant avec l'hélicoptère - la tension actuelle, le nombre d'ampères dépensés, le nombre de satellites de positionnement global capturés et ne vous laissera pas non plus "se perdre" dans le ciel. Il est impossible de se perdre dans le ciel, dites-vous ? Et là, c'est très possible. À partir de l'élémentaire "il a décollé, oh, mais tout est différent d'en haut ... oh, où suis-je moi-même?", se terminant par des conditions de vol difficiles, par exemple, voler dans l'obscurité ou dans les précipitations, ou voler accidentellement dans le cloud, comme dans la vidéo ci-dessous :
A la quatrième minute, seule la flèche salvatrice "home" indiquait où voler.
Ok, ok, assez de paroles, pratiquons !
PRÉPARATION.
Donc, vous avez commandé MinimOSD pour vous-même. Sur Banggood ou Hobbyking ou RCTimer - peu importe où, et j'ai obtenu quelque chose comme ça :
Mes mains me démangent pour le connecter au poste de travail et voir ce qu'il montre. Mais vous n'êtes pas obligé de tout faire d'un coup ! Il est difficile de commander un nouvel OSD - et cela Temps perdu(ce qui est le principal) et bien sûr l'argent perdu.
Il y a deux grosses puces sur la carte : ATMEGA328P et MAX7456. Le premier microcircuit (microcontrôleur, pour être plus précis) est responsable de la communication avec le contrôleur de vol (la "partie numérique" de la carte). Et le second est un OSD monochrome monocanal (OnScreenDisplay - menu à l'écran) de Maxim, appelons-le la "partie analogique" de la carte. Donc, ce MAX7456 est un microcircuit plutôt capricieux. Elle n'aime pas la surchauffe, n'aime pas les sauts brusques entre le sol "numérique" et le "analogique" - bref, elle brûle facilement. Et par chance, les Chinois paresseux ne soudent JAMAIS le dissipateur thermique normal du microcircuit (sur le "ventre"). Si vous utilisez un mouchoir sous la forme dans laquelle il est venu - MAX brûlera - 80% de garantie. Pour éviter que cela ne se produise, nous soudons trois trous marqués sur la photo ci-dessous.

Pour ce faire, insérez une soudure fine (1 mm de diamètre, il est souhaitable qu'elle soit immédiatement avec du flux) dans le trou et chauffez-la avec un fer à souder:

Et voici le résultat (la soudure n'est pas très bonne, mais du mieux que je peux - vous ferez mieux !)

Parlons maintenant des caractéristiques de la connexion. Les personnes attentives ont remarqué que j'ai soudé le cavalier par le haut. Il existe plusieurs façons de connecter MinimOSD, et de nombreuses copies sont cassées, ce qui est mieux ou plus correct ou donne moins d'interférences. J'utilise la méthode de connexion avec la combinaison des masses numériques et analogiques et de l'alimentation à partir de 5 volts de la partie "numérique". Étant donné que minimOSD consomme beaucoup, il est préférable d'alimenter la carte à partir d'une source d'alimentation séparée. Ça ressemble presque à ça :

C'est-à-dire qu'en haut, j'ai soudé le cavalier, unissant ainsi les terres. Et vous devez toujours déposer un cavalier, sur le côté "avant" du plateau.

CONNEXION ET CONFIGURATION
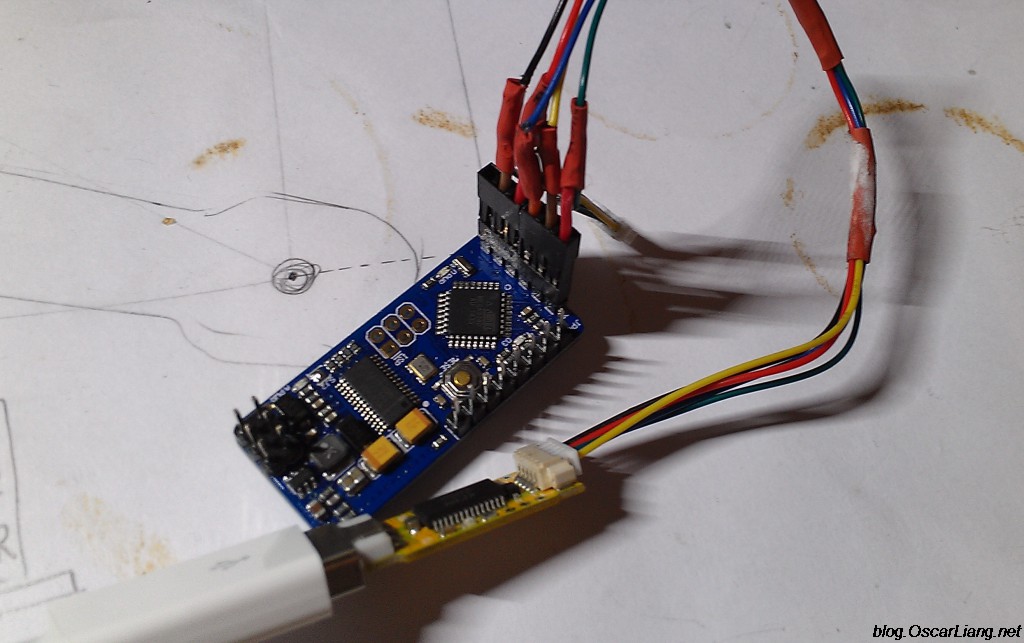
Bon, tout est soudé, maintenant notre foulard est prêt à être connecté à l'ordinateur. Pour ce faire, nous avons besoin d'un adaptateur FTDI (par exemple, sur, ou tout autre adaptateur USB-UART TTL).

Nous nous connectons à l'aide de 5 fils, le schéma de connexion est le suivant : 1. GRN, 2. Tx, 3. Rx, 4. +5V, 5. GND (côté OSD) - nous les connectons à l'adaptateur FTDI 1. DTR , 2.Rxi, 3.Txo, 4.VCC, 5.GND. Voici une image de la façon dont il est connecté pour moi:

Si ce n'est pas clair, regardez cette vidéo, particulièrement attentivement à 1:03
Maintenant, quoi télécharger et comment configurer. Pour commencer, je dirai que pour les hélicoptères et pour les avions, le firmware est différent. Il existe également un firmware pour Multivia (kvTeam), et il existe également des mods séparés - du travail indépendant (sans contrôleur de vol) à la connexion même à Naza.
Mais ici, nous considérons le cas "classique" - un hélicoptère sur un contrôleur AWP. page officielle du projet. page de téléchargement (pour un copter sous AWP, il faut charger ExtraCopter). Mais ce sont d'anciennes versions, les gens ont beaucoup modifié depuis. Les firmwares modernes sont en . Au moment d'écrire ces lignes, c'est le firmware R800, il se trouve (utilisateur MinimOSD_Extra, mot de passe Top_Secret), sur Ya.Disk.
L'archive contient le firmware lui-même (HEX - fichier), un fichier avec les polices (mcm - fichier) et le programme lui-même (OSD_Config.exe).
Tout d'abord, allons dans le gestionnaire de périphériques et vérifions la vitesse du port FTDI (nous allons définir 115200) :

Nous lançons le programme OSD_Config.exe, sélectionnons le port, appuyons sur le bouton "Read From OSD", il devrait y avoir un message indiquant que la lecture a réussi. Comme on ne sait pas quel firmware est chargé en usine, afin de ne pas avoir de problèmes à l'avenir, nous le remplirons avec un nouveau. Pour cela, cliquez sur le menu Optios > Mettre à jour le Firmware

sélectionnez un fichier et téléchargez-le.
Nous recevrons un message sur le firmware réussi

Ensuite, le contrôleur s'initialisera et chargera les paramètres dans le programme, qui seront signalés

Il est temps de télécharger le fichier de police correspondant au firmware (si cela n'est pas fait, l'apparence de l'OSD peut s'avérer très amusante voire illisible). Appuyez sur le menu Option>Mettre à jour le jeu de caractères,

sélectionnez le fichier MCM et téléchargez-le

Nous attendons la préparation

Après le versement, le contrôleur est réinitialisé.



Je m'explique un peu :
Canal RSSI - conversion RSSI en pourcentages. Où 5 volts est 255 (maximum en octal). Et le récepteur FRsky a un signal maximum de 3,3 volts. Si vous cochez la case RSSI activer RAW, alors sur l'écran FPV, nous verrons des données "brutes". Ce sont eux que nous pouvons conduire dans les paramètres. Ou vous pouvez simplement taper mes valeurs.
Une autre subtilité - changer d'écran OSD. Comme vous pouvez le voir, il y a deux panneaux pour les données. Nous pouvons passer à trois options d'affichage - screen1 (Panel1), screen2 (Panel2), écran vide sans données (Disabled). Pour ce faire, nous devons d'abord décider comment exactement nous allons basculer entre les écrans. Par exemple, si nous passons d'un écran à l'autre à l'aide d'un commutateur rotatif ou d'un interrupteur à bascule à trois positions, nous aurons alors trois plages de valeurs par canaux (Panel1 : 0-1233, Panel2 : 1233-1467, Disabled : 1467- 1701). Dans ce cas, le commutateur de commutation de rotation doit être désactivé. Et si nous commutons avec un simple interrupteur à bascule à deux positions, il est logique d'activer la commutation de rotation. En même temps, lorsque l'interrupteur à bascule est activé, nous allons changer d'écran à tour de rôle (Panneau1 -> Panneau2 -> Désactivé -> Panneau1 ......), si l'interrupteur à bascule est désactivé, la commutation entre les écrans se fera arrêt. Le canal qui changera d'écran est déterminé dans la liste déroulante intitulée OSD Toggle Channel. Je l'ai mis sur le canal numéro 6. Et il y a une autre embuscade que certains (dont moi) confondent au départ - Warning Auto Panel Switch. Cette liste définit l'écran vers lequel basculer lorsque l'un des avertissements définis précédemment se produit. Il semblerait que tout soit clair. Vous volez vous-même, quelque chose s'est passé en vol, l'OSD est passé à l'écran que vous avez demandé. Mais voici la question - nous définissons la commutation entre les écrans, en règle générale, cela est configuré à la maison, l'hélicoptère ne vole pas, nous voulons vérifier - les écrans ne changent pas! Mais parce qu'il n'y a généralement pas de GPS Fix à la maison - en bref, un avertissement a fonctionné ! Alors basculer entre les écrans "ne marche pas"... 🙂
Je ne sais pas si le reste des paramètres a besoin d'être clarifié, peut-être que je compléterai l'article plus tard.
Je peux seulement dire que lors de la configuration de l'écran principal, vous ne devez pas tout y mettre en même temps. Il est préférable de tout éteindre d'abord (dans la colonne de gauche), puis d'allumer uniquement ce dont vous avez besoin et de le placer immédiatement dans la partie droite de l'écran. Je recommande de laisser un espace vide sur les bords de l'écran, il peut être coupé par un moniteur ou un DVR avec un stylet ou des lunettes.
Ensuite, un autre point important - Configuration OSD dans Mission Planner. Supposons que vous ayez tout connecté comme il se doit, mais au lieu de chiffres amusants et d'un horizon artificiel, nous voyons l'inscription ennuyeuse «No Mavlink Data». Cela signifie que l'OSD fonctionne, il serait heureux de vous montrer quelque chose, mais il ne reçoit pas de données. C'est-à-dire qu'aucune donnée du poste de travail n'arrive à la broche Rx. Première raison possible— les fils sont mélangés lorsqu'ils sont connectés. Vérifiez que le Rx de l'OSD est connecté au port Tx du poste de travail. La deuxième raison possible est que le contrôleur lui-même n'est pas configuré pour envoyer des données au port COM. Pour ce faire, dans un cas simple, dans l'onglet CONFIGURATION INITIALE> Matériel en option> OSD, vous devez appuyer sur le bouton Activer la télémétrie. Dans le même temps, le MP configure automatiquement un certain nombre de paramètres qui vous permettent d'envoyer des données à l'OSD. Si ce bouton magique n'a pas aidé, vous devrez tout configurer avec de petites mains. Pour cela, allez dans l'onglet CONFIG / TUNING > Full Parameter List, descendez jusqu'à la lettre S, et vérifiez (ou corrigez) les valeurs des paramètres :
- SR0_EXT_STAT = 2
- SR0_EXTRA1 = 5
- SR0_EXTRA2 = 2
- SR0_EXTRA3 = 3
- SR0_POSITION = 2
- SR0_RAW_SENS = 2
- SR0_RC_CHAN = 5
Si les données n'arrivent toujours pas et que nous voyons toujours l'inscription terne "No Mavlink Data", alors vous devez vérifier si l'OSD est connecté au bon port (l'article parle d'UART0), vous aurez peut-être besoin des paramètres SR1 ( comme décrit ci-dessus, pour le port UART1 uniquement). Il est également possible que l'OSD ne fonctionne pas pour vous avec le modem de télémétrie - dans ce cas, vous devrez peut-être connecter ou, au contraire, déconnecter le fil Tx sur l'OSD. Il y a aussi un petit problème que l'OSD ne fonctionne pas lorsque le câble USB est connecté à l'ordinateur. Ou peut-être avez-vous juste foiré les fils ...
Je partagerai une autre photo. Sur ma manette, à cause d'un crash, le port principal pour la télémétrie a cessé de fonctionner, j'ai juste soudé à UART0. Et puis j'ai aimé cette connexion.

Ici, j'ai alimenté directement à partir du contrôleur. Mais il est OBLIGATOIRE de vérifier ce qu'il reste de 5 volts au contrôleur lui-même. Dans mon cas, le contrôleur lui-même est alimenté par le récepteur, et là, il est réglé sur un peu plus de 5 volts, de sorte que, compte tenu du récepteur et du minimOSD, pour l'APM lui-même, il était strictement de 5 volts.
Un autre point doit être abordé. Si l'OSD ne clignote pas correctement, l'erreur " impossible de parler au bootloader". Cette erreur se traduit littéralement par "erreur de communication avec le chargeur de démarrage". Cela peut se produire soit dans le cas de fils emmêlés, soit lorsque le chargeur de démarrage plante. Si dans le cas des fils, tout est clair (voir ci-dessus comment se connecter correctement), alors dans le cas du chargeur de démarrage, une procédure de restauration du microcontrôleur est nécessaire.
Restauration du chargeur de démarrage.
Pour ce faire, nous avons besoin d'au moins un programmeur. Il est plus pratique d'utiliser USBasp.

peut-être aimerez-vous cet adaptateur (ISP10<>FAI6)
 ou ce câble (disponible sur)
ou ce câble (disponible sur)

En général, d'une manière ou d'une autre, nous nous connectons à l'ATMega328P à l'aide d'un programmeur.
Le brochage du connecteur ISP sur la carte OSD est généralement accepté. Habituellement, le premier contact est carré. Sinon, il est préférable de vérifier en regardant Vcc et GND.

Sur le programmateur, les broches sont généralement signées, sinon, cela ressemble généralement à ceci :

Pour ce faire, sélectionnez d'abord le type de programmateur

Choisissez ensuite le type de planche

Et type de microcontrôleur


et attendez environ une minute jusqu'à ce que le chargeur de démarrage soit chargé (regardez la barre d'état verte en bas)
 Jusqu'à ce qu'un message apparaisse indiquant que le chargeur de démarrage a été flashé avec succès
Jusqu'à ce qu'un message apparaisse indiquant que le chargeur de démarrage a été flashé avec succès

(nous ne prêtons pas attention aux erreurs ci-dessous, vous devez mettre à jour le firmware du programmeur)
Ensuite - allez à OSD_Config.exe, remplissez le firmware et les polices, comme déjà décrit. Vous devrez peut-être télécharger le firmware deux fois (une fois de plus est nécessaire pour l'initialisation correcte du contrôleur après le téléchargement du bootloader).
Eh bien, c'est à peu près tout. Du coup, qui ne sait pas, il n'y a plus. Si quelque chose n'est pas clair ici, vous pouvez "vivre" le voir là-bas.
Bonne chance pour l'installation de l'OSD sur votre quad !
Toujours a vous, Ganiev Timour - 5yoda5.
5yoda5#apmcopter
Mise à jour 11/11/2015 :"Eh bien, tout est soudé, maintenant notre foulard est prêt à être connecté à l'ordinateur. Pour ce faire, nous avons besoin d'un adaptateur FTDI (par exemple, sur le RCTimer, ou tout autre adaptateur USB-UART TTL).
Mise à jour 11/03/2016 : Ajout d'images de brochage ISP.
Si vous trouvez une erreur sur la page, cliquez sur Maj+Entrée ou pour nous prévenir.
L'OSD est un accessoire utile pour le vol de caméra. Dans cet article, nous verrons ce qu'est un OSD, comment il se connecte à notre équipement FPV et, enfin, un aperçu des capacités des différents OSD.
Si vous avez des questions - faites le moi savoir dans les commentaires.
Qu'est-ce que l'OSD et quels sont ses avantages
OSD signifie On Screen Display - c'est-à-dire affichage à l'écran ou menu à l'écran (c'est-à-dire, en haut de l'image principale, généralement à partir de l'appareil photo, une sorte de Informations Complémentaires, principalement du texte). Dans notre passe-temps, OSD est un petit circuit imprimé, qui affiche les paramètres de vol en haut de l'image de votre appareil photo. Cela vous permet de surveiller l'état du quadricoptère directement pendant le vol sur la caméra.
Si vous avez les bons capteurs et un OSD, vous pourrez voir les données de vol directement sur vos lunettes ou votre moniteur, telles que la tension de la batterie, la consommation de courant de vos moteurs et autres appareils électroniques, votre altitude, les coordonnées GPS, etc.
Cela rend le vol autour de la caméra plus sûr, car vous pouvez voir le niveau de la batterie, savoir quand atterrir, jusqu'où vous avez déjà volé et dans quelle direction vous devez revenir.
L'OSD n'est pas requis pour le vol de la caméra, mais comme vous pouvez le voir, il est extrêmement utile. La plupart des gens achètent au moins un SimpleOSD pour voir la tension sur la batterie, cela est nécessaire afin d'éviter une décharge excessive (si vous volez loin, alors la sirène signalant une batterie faible n'est pas audible).
Types de données pouvant être affichés à l'aide de l'OSD
L'image montre l'ensemble de données le plus couramment utilisé lors du vol autour de la caméra.

Minuteur
Selon le type de votre OSD, cela peut être le temps de vol (à partir du moment où vous décollez) ou le temps de fonctionnement (à partir du moment où le quadcoptère est allumé). Certains OSD vous permettent d'afficher plusieurs types de minuteries.
Voltage de batterie
Presque tous les OSD vous permettent d'afficher la tension. C'est l'information la plus importante lorsque vous volez autour de la caméra, vous savez donc quand atterrir (j'atterris généralement lorsque la tension chute à 3,5 V par cellule)
Consommation de courant
Si vous avez un capteur de courant, vous pouvez suivre la quantité de courant consommée par les moteurs et la quantité de mAh de votre batterie déjà dépensée.
RSSI
Le RSSI est une indication de la puissance du signal de votre émetteur, généralement exprimée en pourcentage. Plus vous volerez loin, plus le signal sera faible, ces informations vous permettront de savoir à quel moment vous devrez rebrousser chemin.
RSSI est la sortie de votre récepteur de contrôle, généralement au format PWM, vous aurez donc peut-être besoin d'un convertisseur N/A et d'un filtre passe-bas.
Avertissements
Certains OSD peuvent afficher différentes alarmes, avertissements, pour lesquels vous, en tant qu'utilisateur, devez définir des valeurs de seuil pour des paramètres tels que la tension de la batterie, la valeur RSSI, etc.
Mode avion
Spectacles mode actuel vol de votre hélicoptère. Ces informations seront utiles si vous basculez souvent entre différents modes, tels que Loiter (planant sur place), mode manuel, mode d'auto-nivellement, vous n'avez donc pas à vous demander dans quel mode se trouve actuellement l'avion. Pour ce faire, vous devrez connecter le contrôleur de vol à l'OSD.
GPS
En utilisant le GPS, vous obtenez non seulement les coordonnées du drone, mais également son altitude (bien qu'elle soit plus précise que l'utilisation d'un baromètre ou d'un sonar). Grâce à calculs délicats, on peut voir la vitesse au sol, la distance au point de départ et ses coordonnées (un affichage graphique de la direction vers le point de départ est une chose très utile, surtout si vous vous perdez un peu).
Horizon
L'horizon virtuel vous aidera à comprendre comment le drone est incliné dans l'espace.
Connexion OSD dans la caméra, l'émetteur vidéo et le contrôleur de vol
Je diviserais tous les OSD en 3 types :
- OSD autonomes
- OSD dépendant du contrôleur de vol
- hybride
Les OSD autonomes se connectent uniquement à la caméra et à l'émetteur vidéo et ne communiquent pas avec le contrôleur de vol. Parfois, ils peuvent être connectés directement au GPS ou à d'autres capteurs afin d'avoir accès à leurs lectures. Un bon exemple de ce type est Skylark OSD (+GPS et capteur de courant) et Super Simple OSD.
Les OSD dépendants du contrôleur reposent uniquement sur les données du contrôleur de vol, généralement via le port série (RX/TX). L'OSD lui-même ne fait rien d'autre qu'afficher ces données. MinimOSD avec Hobbyking est bon exemple ce type d'OSD (si la version est sans modifications, comme le mod KV). L'avantage de ce type est que l'OSD utilise les données reçues des capteurs du contrôleur, ce qui signifie que le contrôleur lui-même utilise ces données pour simplifier la gestion et le contrôle. Alors que dans le cas des OSD autonomes, les données des capteurs connectés à l'OSD ne peuvent pas être utilisées par le contrôleur de vol.
L'OSD de type hybride peut être utilisé comme un OSD autonome (avec des fonctionnalités limitées) et peut également être connecté à un contrôleur pour augmenter l'ensemble des données de vol affichées. MinimOSD avec mod KV est un excellent exemple de ce type d'OSD : s'il est utilisé de manière autonome, vous ne pouvez voir que le RSSI et la tension, mais lorsqu'il est connecté à un contrôleur avec GPS, vous verrez alors le mode de vol actuel, les coordonnées GPS, l'altitude , etc.
Connexion la plus simple - OSD autonome
Par exemple, connectez Hobbyking Super Simple OSD à la caméra FPV, à l'émetteur vidéo et à la batterie au lithium 3S.

Théoriquement, vous pouvez surveiller la tension sur la deuxième batterie en utilisant le port Bat2.
Connexion d'OSD hybrides
Je note que dans ce cas, l'OSD mesure indépendamment la tension de la batterie et le niveau RSSI (bien qu'il soit possible de les connecter au contrôleur et de transmettre des données via son port série, les deux options fonctionnent bien).
Si vous avez besoin d'afficher les coordonnées, la direction vers le point de départ et la distance jusqu'à celui-ci, vous devez connecter le GPS à Naze32.
OSD que j'ai déjà utilisé
MinimOSD avec KV Team Mod
MinimOSD est actuellement mon OSD préféré et c'est celui que j'utilise. En téléchargeant le firmware approprié, MinimOSD peut être utilisé avec les cartes Naze32, CC3D, Multiwii, APM et PixHawk. C'est très bonne paye, qui peut afficher absolument toutes les informations de vol disponibles à partir des capteurs.

MinimOSD peut afficher toutes les informations disponibles à partir des capteurs
Hobbyking et Banggood vendent MinimOSD mais ils ont la version originale qui n'a pas de broches supplémentaires sur le côté pour le RSSI, la tension de la batterie, etc. Je ne les contacterais pas s'il est possible d'acheter MinimOSD KV Mod.
MinimOSD Micro

Exactement le même OSD que décrit ci-dessus, la différence est taille plus petite. De plus, il n'y a pas de convertisseur 12V -> 5V dessus, mais ce n'est pas important, car. de toute façon, personne n'utilise ce convertisseur en raison d'une surchauffe de la carte.
CerveauFPV
Cette carte montre également n'importe quoi, avec les capteurs appropriés.

Betaflight OSD (On Screen Information) est une information intégrée de divers capteurs au flux vidéo via le contrôleur de vol. Habituellement, l'OSD est une carte supplémentaire installée ou une puce déjà intégrée dans le contrôleur de vol. L'OSD transmet des informations telles que la tension de la batterie, l'horizon, l'altitude, etc. à l'écran du casque ou des lunettes.
Vous pouvez également utiliser le menu OSD pour modifier le PID, les filtres et d'autres paramètres du quadricoptère. Dans cet article, j'expliquerai ce qu'est Betaflight OSD, ce qu'il fait et comment le configurer.
Betaflight OSD contre MinimOSD (MWOSD)
Betaflight OSD est plus simple et meilleur que MinimOSD :
- Le premier est une puce déjà intégrée dans le contrôleur de vol, vous n'avez pas besoin de souder et de connecter quoi que ce soit, tandis que MinimOSD est une carte séparée sur laquelle vous devez souder tous les composants du quadricoptère, tels qu'un PC, une caméra, une vidéo transmetteur, et ainsi de suite, selon les capteurs que vous utiliserez le plus. De plus, vous avez besoin d'un programmeur pour flasher ce module via un ordinateur.
- Avantages de Betaflight OSD : installation facile car tout est déjà intégré. La configuration a lieu dans l'interface graphique Betaflight. Vous n'avez pas besoin de souder, de flasher quoi que ce soit, vous n'avez pas besoin d'un programmeur et d'un micrologiciel de module tiers.
- L'OSD Betaflight n'occupe pas de port UART car il est normalement connecté au BUS SPI.
Bien que maintenant MinimOSD soit déjà assez bien développé et possède également une coque graphique et des caractéristiques similaires.
Quels contrôleurs de vol prennent en charge Betaflight OSD
Tous les contrôleurs de vol avec un OSD intégré ne prennent pas en charge l'OSD Betaflight, certains nécessitent un logiciel de configuration OSD supplémentaire.
Actuellement, Betaflight OSD est pris en charge par les avions suivants : Matek F405, DYS F4 Pro, Kakute F4, Omnibus F4 et Betaflight F3.
Configuration de Betaflight OSD
Assurez-vous d'abord que vous avez dernière version sur le contrôleur de vol car l'OSD est pris en charge dans Betaflight V3.1 et les micrologiciels plus récents.
Si votre avion dispose déjà d'une puce OSD intégrée, connectez simplement la caméra et l'émetteur vidéo aux ports appropriés.
Vous trouverez ci-dessous un exemple de connexion de la caméra et de l'émetteur au contrôleur de vol DYS F4 Pro FC, la caméra se connecte à "Vin" et l'émetteur à "Vout":
Connectez-vous maintenant à Betaflight Configurator, allez dans l'onglet Configuration et allumez OSD :
Après cela, accédez à l'onglet OSD pour commencer la configuration :
Quoi de plus simple que cette interface ? Activez et désactivez simplement les données que vous souhaitez afficher.
Format vidéo - Sélectionnez PAL ou NTSC, selon le mode dans lequel se trouve votre caméra FPV. Si vous ne savez pas dans quel mode se trouve l'appareil photo, réglez-le sur AUTO, le programme choisira format souhaité pour que la caméra fonctionne.
Une information important : si écran Aperçu en mode PAL ou AUTO et que votre caméra fonctionne en NTSC, les données affichées en bas de l'écran seront coupées, c'est une fonctionnalité ce format, il a un cadre plus court. Lorsque vous utilisez le format AUTO, il est préférable de placer les données dont vous avez besoin au milieu de l'écran.
Dans le bloc "Alarme", vous pouvez régler les valeurs RSSI, la capacité de la batterie, le temps de pré-vol (chronomètre) et l'altitude. Dès que les données commenceront à correspondre à ces chiffres, ils commenceront à clignoter sur l'écran du casque ou des lunettes.
Dans la fenêtre d'aperçu, vous pouvez faire glisser les données affichées comme vous le souhaitez, mais ne les placez pas trop près des bords, car elles pourraient alors être coupées.
- Affichage de la tension de la batterie
- Temps de vol (chronomètre)
- Nom (propre)
- Valeurs de gaz
- Combien de courant consomme le drone
- Combien de capacité de batterie mAh est gaspillée
Pour activer le menu OSD dans des lunettes ou un casque, vous avez besoin d'une combinaison de mouvements du stick sur la télécommande :
- gaz au centre
- lacet (lacet, roulis d'axe) à gauche
- tangage (tangage, inclinaison) vers l'avant
Le gaz doit être au milieu de tout le réglage!
Pour naviguer dans le menu, utilisez Stick droit sur la télécommande. Pour faire défiler - bâton haut ou bas, pour sélectionner un élément de menu - bâton gauche / droite.
Ici, vous pouvez modifier les PID, les filtres, les profils, etc. La plupart de ces paramètres sont explicites si vous avez déjà configuré Betaflight via l'interface graphique de l'onglet OSD. Mais encore, tous les articles ne sont pas là, certains ne sont disponibles que dans le configurateur lui-même. Après avoir effectué les réglages, allez dans le menu principal et cliquez sur " Enregistrer * Redémarrer«.
Comment changer la police dans Betaflight OSD
Si vous n'aimez pas la police qui s'affiche à l'écran, vous pouvez facilement la changer dans le configurateur Betaflight, pour ce faire, allez dans l'onglet OSD et il y aura un bouton Font Manager en bas :
Après avoir choisi une nouvelle police, la fenêtre d'aperçu affichera toujours la police par défaut, mais vous aurez celle que vous avez choisie avec vos lunettes et votre casque, alors ne vous inquiétez pas.
Questions fréquemment posées
Pourquoi ne puis-je pas voir les données de l'OSD dans le casque ?
Vérifiez si vous avez spécifié le bon format vidéo, PAL ou NTSC, essayez de permuter. Si cela ne fonctionne toujours pas, vérifiez la qualité du câblage et de la soudure de la caméra et de l'émetteur au module OSD.
Comment changer le nom ?
Dans Betaflight, onglet config, faites défiler vers le bas, il y aura un champ de texte "Craft name", vous pourrez y saisir un autre nom.